基于AVR的電源管理系統的設計

3 實驗結果分析
控制器在得到電源電壓、繼電器狀態、充放電情況等信息后, 將這些信息傳給地面并保存到PC 機上面。圖8 所示就是飛機在飛行時采集到的數據。
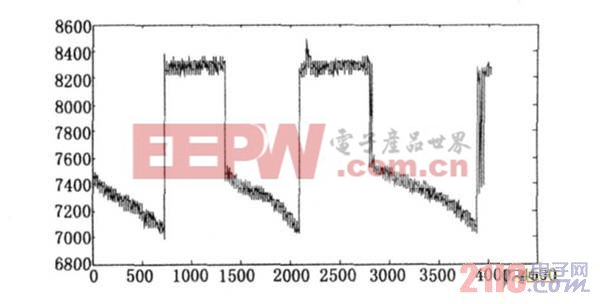
圖8 電池1 充放電數據。
從圖中可知, 首先電池1 作為負載給系統供電, 經過一段時間使用后由7.5V 降到7.0V, 此時單片機在檢測到該電池電量不足后驅動繼電器, 并將該電池切換到充電回路。經過10 分鐘充電后, 因電池2 的電壓也小于7V 單片機再次將系統的電源切換到電池1, 如此反復直至完成任務。由此可知該系統能將動能轉換為動能并有效的管理系統的用電循環, 提高了系統的運行時間, 從而提高整個系統的實用性和可靠性。
4 結束語
本文設計了一套UAV 電源管理系統, 該系統具有自動控制充放電管理, 實時監測電池電壓等功能。該系統已經經過調試和試驗驗證了其可行性, 但是為了保證飛機安全, 還要做更多的試驗以保證無人機自主飛行的安全和穩定。除此之外, 高低頻濾波, 電池電量預測等也是重要的方向, 需要深入的研究。現今, 鋰電池的使用范圍越來越廣, 其價格也相對適中,如果掌握先進的科學的使用方法, 讓鋰電池發揮應有的最大效用, 將會節省大量的資源和財富。








評論