單片機自動巡線輪式機器人控制系統設計

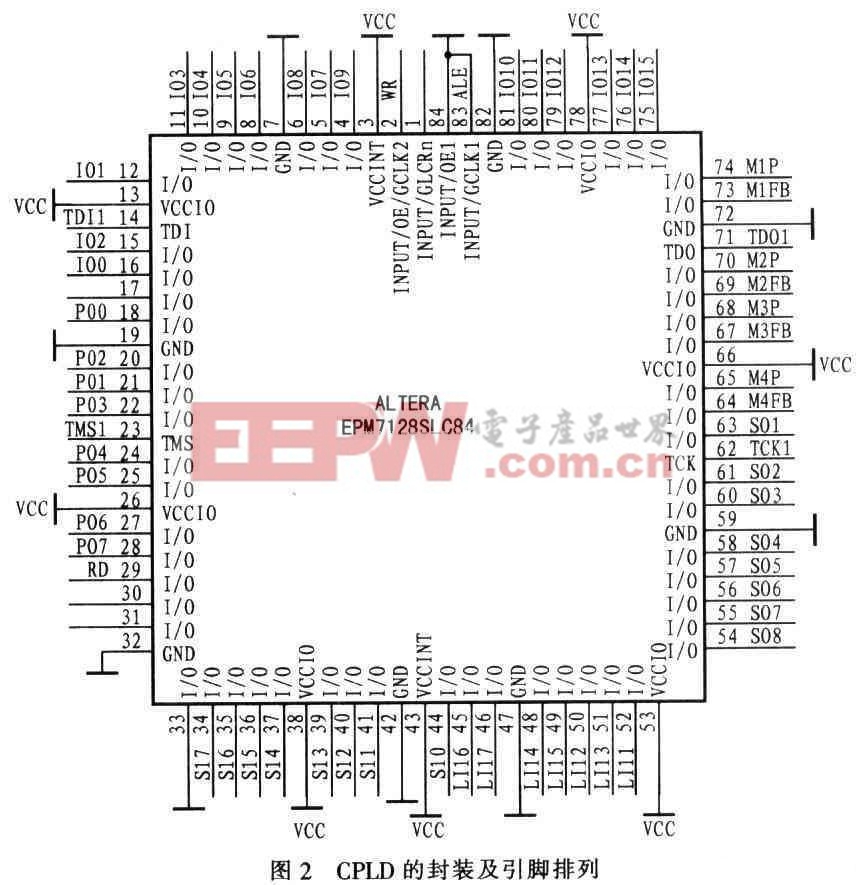
EPM7128的引腳排列
單片機采用24MHz的晶體振蕩器,ALE信號的頻率fALE=f16=6MHz,最終輸出PWM信號的引腳MlP的頻率為:
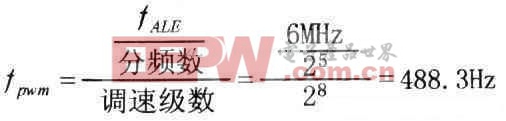
公式
調節這個信號的占空比可以使直流電動機獲得O-255級的轉速。
3.2 機器人運行參數存儲器的擴展
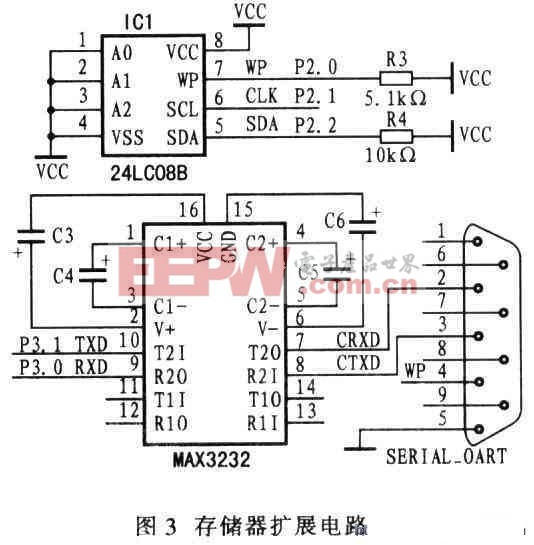
機器人運行路徑和動作可以根據比賽情況的不同而發生變化,這樣,每改變1次運行參數就必須對單片機的Flash進行1次擦寫。為了解決這一問題.擴展了程序參數存儲器,用來存放機器人的運行路徑和動作參數.擴展電路如圖3所示。
擴展電路
其中IC1為24LC08B,是I2E總線的串行E2PROM存儲器,最多能夠存儲lK字節的數據。IC2為MAX3232型電平轉換器,其內部有1個電源電壓變換器,可以將計算機的電平轉換為標準TTL電平,實現計算機與單片機之間通過串行口傳輸數據,使單片機完成對24/LC08B的數據存儲操作。單片機運行時,直接從24LC08中讀取機器人的運行參數,控制機器人運行。
行程開關相關文章:行程開關原理










評論