一種實用的PIC編程器的設計

2.1 控制模塊的實現
為了實現控制模塊對MCLR端的電平控制,使用2個晶體管T1、T2,如圖3所示。當單片機I/O口為高電位時,T1導通,其發射級為低電位,T2導通,于是電源VPP與PIC的MCLR端接通;當I/O口為低電位時,T1截止,其發射級為高電位,T2截止,VPP和MCLR端之間斷開。
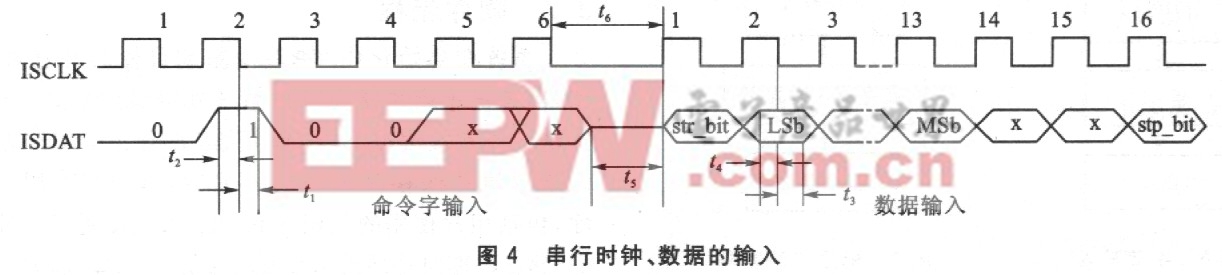
由命令字表中可知,若導人數據的命令字是xx0010B,低位在前由ISDAT輸入,每次ISCLK的下降沿對ISDAT采樣。以上代碼實現了“0”、 “1”的輸入,其他命令的輸入類似。數據輸入和命令輸入都是下降沿有效。每次導入1字節的數據為12位,但是必須在16個時鐘脈沖中完成。前6個時鐘脈沖的下降沿輸入命令字,且前4位有效。一段時間參數的延遲后,數據開始輸入,第1個時鐘下降沿輸入起始位,后第2~13個時鐘的下降沿輸入1字節的數據,共 12位。第14、15個時鐘下降沿輸入數據無效,最后一個下降沿輸入停止位(起始位和停止位固定為O)。












評論