數字控制PFC電路的模型與環路設計分析


3.1.1 電流環補償器的設計
電流環通過調節MOS管來使輸入電流跟蹤輸入電壓從而得到正弦波形。由于電流基準信號為全波整流信號,電流反饋回路必須有足夠的帶寬來保證輸入電流跟蹤上參考信號。
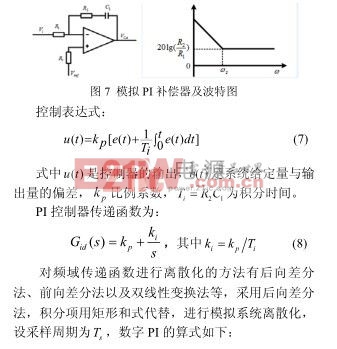
在未加入補償器時開環傳遞函數:
在理想情況下輸入電感電流能快速準確的跟蹤全波整流基準信號, 希望校正后的開環傳遞函數要滿足:
1、低頻時直流增益無限大,系統的穩態誤差為 0;
2、中頻段時盡可能大的帶寬以實現快速跟隨,以-20dB/dec 的斜率穿越 0dB 的, 并有足夠的相位裕度保證系統穩定;
3、 在高頻段, 開環傳遞函數呈衰減特性,抑制高頻信號對系統的干擾。對于模擬的 PI 補償器, 為使平均電流控制的電路穩定,電感電流向下的斜率乘以電路誤差放大器的在開關頻率的增益須與振蕩器的斜波斜率相等此標準給出了電流補償器在開關頻率處得上限值,如果增益太高,電感電流斜率將會比振蕩器斜率大,整個環路將會更加不穩定。因此設計原則:
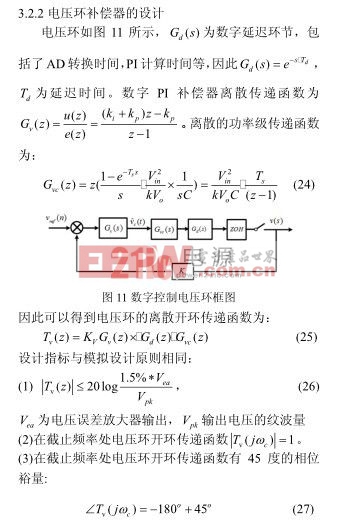
3.1.2 電壓環數字補償器的設計
電壓環的帶寬相對于開關頻率太低,所以對帶電壓回路控制的主要目的是使輸入失真達到最小,而不是用來提系統穩定度。由于輸出電壓中含有的二次諧波量,導致輸入電流參考信號中出現三次諧波因此回 路的帶寬必須足夠小,才能減少輸出電容上的線頻率的二次諧波以低輸入電流的調制量。因此設計原則:
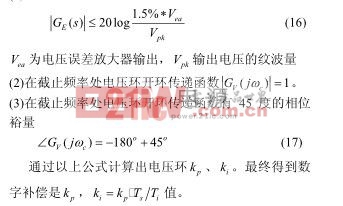
(1)電壓補償器在 100 Hz 處的增益滿足
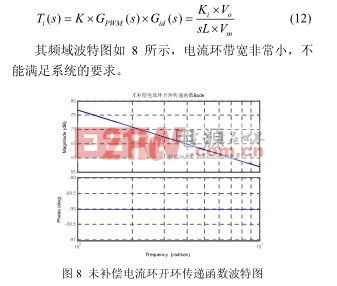
3.2 數字 PI 控制器 Z 頻域設計法
模擬設計方法由于忽略了回路中的延遲和零階保持器,因此得到的參數并不精確。為獲得更好的性能,設計數字 PI 控制器時, 利用模擬控制器的設計經驗直接在離散 Z 域進行設計,但存在一定的近似性和不確定性。本文采用后向差分法進行 Z 變換,得到 PI 控制器在 Z 頻域的傳遞函數,直接在 Z 域中進行零、極點配置或響應分析。
3.2.1 電流環補償器的設計
對于數字控制出現的控制延時可等效為在前向通道串入延時環節,包含了 ADC 轉換時間,計算時間、零階保持器等, 其對數字控制系統的性能有很大影響。由于延時,系統的帶寬被減小,在某些情況下,系統會發生振蕩甚至失去穩定性。



dc相關文章:dc是什么
電子鎮流器相關文章:電子鎮流器工作原理





評論