一種智能循跡小車設計方案

摘要:本文設計了一種智能循跡小車,以16位單片機MC9S12XS128為核心控制器,通過攝像頭采集道路軌跡信息,單片機對圖像數據進行處理并采用PID控制算法調節智能循跡小車的行駛路徑。實驗證明,該智能循跡小車能夠準確快速地對道路軌道進行辨識和跟蹤,具有適應性強,實時性好,速度快的優點。
本文引用地址:http://cqxgywz.com/article/184612.htm引言
智能車作為智能交通系統的關鍵技術,融合了人工智能、自動控制、電子電路、信號處理等許多高新技術,具有廣闊的應用前景。本文對小車自主駕駛技術展開研究,設計了一種能夠沿著道路軌跡自動行駛的智能循跡小車。系統采用16位單片機MC9S12XS128[1-2]對攝像頭采集的道路圖像數據進行處理,采用PID控制調節小車行駛方向,使小車能夠沿著道路自主行駛,無須外界附加人工控制。
總體方案
本文設計的智能循跡小車方案如圖1所示。圖像采集模塊拍攝道路圖像并輸入到MC9S12XS128控制核心,進行處理以獲得道路信息;通過光電編碼測速傳感器來檢測車速,并采用單片機的輸入捕捉功能進行脈沖技術計算速度和路程;舵機轉向采用PD控制;電機轉速控制采用PID控制,通過PWM控制驅動電路調整電機的功率;而車速的目標值由默認值、運行安全監控和基于圖像處理的優化策略綜合控制。
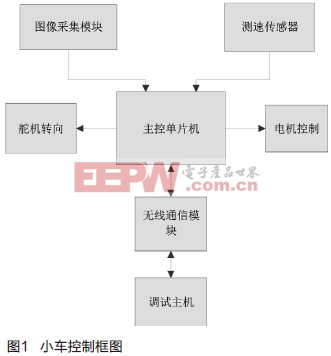
同時,為了便于在調試階段對小車運行信息進行紀錄以及優化控制算法,增加了無線通信模塊,方便與主機進行調試信息傳輸。
硬件結構
主控板采用MC9S12XS128最小系統板,板上主要由時鐘和復位電路構成。實驗證明,MC9S12XS128可以穩定工作在80MHz,相比于以51單片機為控制核心的方案而言[3],處理能力有較大提升。另外,最小系統板將I/O端口引出供各模塊使用。控制板主要由供電單元、電機驅動模塊、攝像頭接口構成。
供電單元
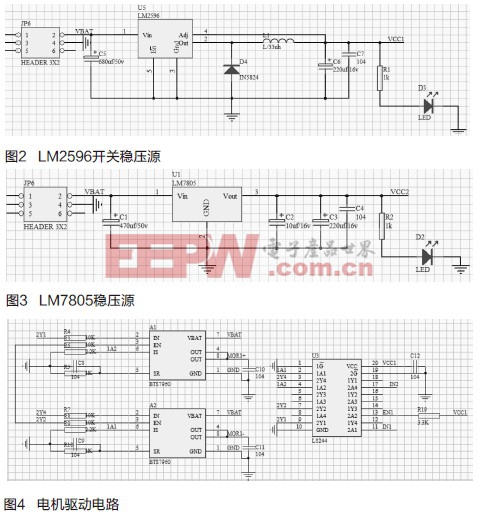
系統使用7.2V電池供電,電源經轉換后輸出5V給電機驅動模塊、舵機、最小系統板和攝像頭部分供電。為了提高系統穩定性,采用雙穩壓源方案。即對于電機驅動模塊、舵機等要求轉換效率較高的模塊采用LM2596開關穩壓源供電,而最小系統板和攝像頭部分對電壓穩定性要求較高,因而采用線性穩壓源LM7805。LM2596和LM7805電源轉換電路分別如圖2和圖3所示。

pid控制相關文章:pid控制原理
pwm相關文章:pwm是什么
51單片機相關文章:51單片機教程
伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理
脈寬調制相關文章:脈寬調制原理 攝像頭相關文章:攝像頭原理 鎖相環相關文章:鎖相環原理








評論