基于CP-132UL V2的IMU地面測試軟件設計

加速度計誤差參數的標定采用在重力場靜態條件下多位置標定方法。慣組加溫穩定以后,按照表3所示的12個位置順序進行標定。本文引用地址:http://cqxgywz.com/article/195773.htm

在測試過程中,如果某個位置數據不夠理想,可重新測定,也可在完成所有位置測試后,重新測定某個或幾個位置。所以在程序設計中,需要增加允許糾錯補錯功能,為每個位置設定其標志符,并且確定每個位置數據存入的數組位置,這樣重新測定某個位置后,新數據覆蓋舊數據,從而實現糾錯補錯功能。由于前面每個位置的數據都固定位置,所以處理數據時只需到已確定的位置讀取數據即可。
4.3.2 陀螺標度因數與安裝誤差系數的標定
采用速率標定方法來標定陀螺標度因數和安裝誤差系數。按X、Y、Z軸標定,允許糾錯或補錯。在單軸轉臺,利用轉臺的正反轉相互抵消地球角速度的影響。為了減小轉臺不水平的影響,采用提高轉速的方法,以高于30°/s的轉速來實現,由于地球自轉角速率相對于轉臺轉速來說很小.因此將轉臺近似視為繞慣性空間轉動。為了避免動態效應.轉臺的旋轉啟動和停止均不包括在測試時間之內。為提高試驗精度,采用整圈標定法,其轉動時間為120 s,轉數為10圈。
4.3.3 陀螺零位的標定
取天北西,天南東,地南西,地北東4個位置,每個位置靜態測試時間約20 min。設置4個標志位分別對應4個位置,然后將4個位置的數據分別存入內存數組中。將存入內存數組中的4個位置的數據分別帶入(1)式得到陀螺零位。陀螺零位為4個位置陀螺輸出的算術平均值(Dx0)。
![]()
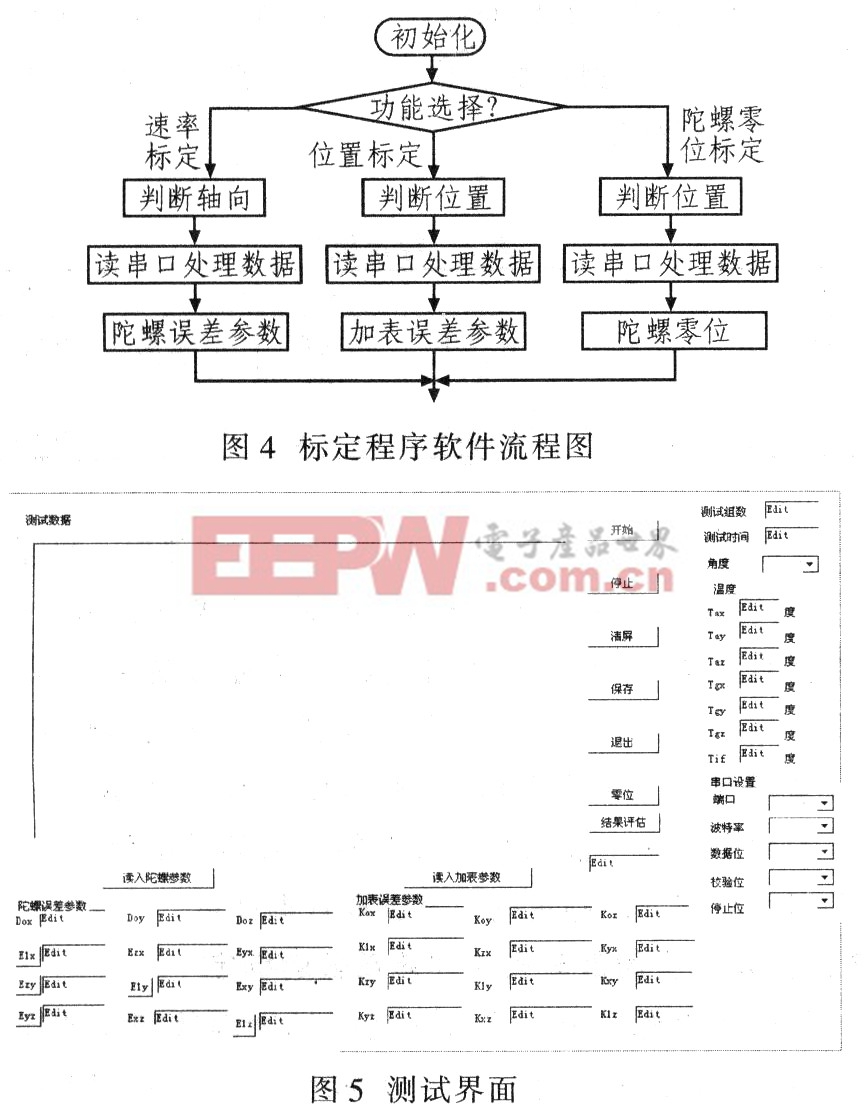
4.3.4 程序設計流程
標定測試共分為3步:①位置標定,完成對加速度計的標定;②速率標定,標定陀螺的安裝誤差和標度因數;(9陀螺常值標定。圖4為總程序設計流程。按照圖4的流程,設計圖5所示的測試軟件。設計中首先判斷功能.選擇所需的功能,只需設置3個標志符,每個標志符對應相應的功能。具體測試功能中,建立3個類,各個類編寫各自的測試功能。位置標定時,由于位置比較多,對每一個位置都應設置各自的標志符,采集到的數據存儲在內存中固定位置。這樣處理數據時只需讀取相應位置,避免誤操作,縮短操作時間。在速率標定時,設置3個全局變量分別表示3個軸,同時在補測時,可直接將舊數據覆蓋新數據。陀螺零位測試時,由于測試時間較長,在測試初始化中需占用的數組存儲空間較大,數據處理部分和位置標定差不多。圖5是測試界面。
5 結果評估
將IMU組合置于平板上,利用所測得的陀螺和加表的各項誤差系數,根據陀螺和加表的誤差方程,求得此時陀螺和加表在標得的誤差系數下的輸入,即陀螺各軸敏感的地球自轉角速度和加表各軸敏感的重力加速度,然后與理想的地球自轉角速度及重力加速度相比較,評估標定結果。如果相差在陀螺和加表的精度允許范圍內,說明標定結果比較滿意。
6 結語
CP一132UL V2一端接IMU組合,另一端直接插入工控機,采用VC6.0編寫滿足測試方案的測試軟件。經工程測試證明,測試軟件與CP一132UL V2兼容性好,在高波特率下工作穩定,順利完成IMU的地面測試。






評論