基于模糊PD控制的電動助力轉向系統建模及仿真分析

電動助力轉向系統其本身是一個比較復雜的非線性隨動系統,這就決定了獲取系統精確的數學模型的有很大困難。另外系統本身受到諸如車速、扭矩測量裝置精度與靈敏度、路況等因素產生的系統擾動等變數的影響,事實上對系統對精確度要求不是非常高,而對系統的實時性要求比較高。而糊控制器不依賴系統的精確數學模型,對系統參數變化不很敏感,具有很強的魯棒性和控制穩定性。很適合汽車這一類快速動態統。
本文引用地址:http://cqxgywz.com/article/197037.htm針對轉向系統的“輕”與“靈”的矛盾(車轉向系統的轉向輕便性與路感相互制約的現象)提出一種能獲得理想助力特性的策略,并根據此策略確定了一種雙模糊表的模糊自調整PD控制器。很好地解決了“輕”與“靈”的矛盾,并在提高輕便性的同時保證駕駛員可以獲得充分的路感。
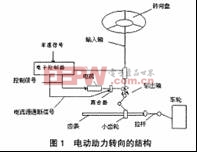
1 電動助力轉向的工作原理
駕駛員根據路感操縱方向盤時,扭矩傳感器將檢測輸入扭矩的大小和方向信號傳給控制器,控制器根據扭矩傳感器信號確定助力扭矩的大小和方向,即通過調整直流電動機的電樞電壓控制電樞電流,從而調整轉向助力的大小和方向。同時控制器還根據不同車速調整助力大小。車速越低助力越大,車速越大助力越小。當車速大于一定值時,取消助力,將直流電動機反接制動,使汽車高速行駛時方向感沉穩,行駛安全。
2 電動助力轉向的數學模
2.1 汽車2自由度轉向模型
將汽車簡化為一個具有側向和橫擺運動的2自由度的汽車模型,當其側偏角很小(小于5°)時,其運動微分方程。

2.2 EPS的模型
EPS的控制目標是改善汽車操縱的輕便和轉向的靈活性,評價汽車轉向系統的輕便性可以從方向盤操縱力和方向盤把持力兩個不同的角度來考慮,本文從方向盤操縱力角度研究轉向系統的輕便性。本文選取汽車橫擺速度ωr評價轉向的靈活性。
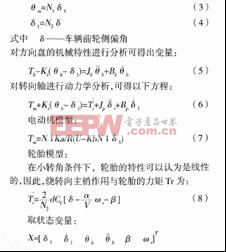
2.2.1 轉向系統動力學方程
為分析問題方便,把前輪和轉向機構向軸簡化。從電動機到轉向軸的傳動比為N1,而從轉向軸到前輪的傳動比為N2,故有:
輸人變量:U=[Th u]
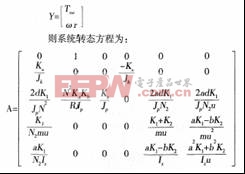
系統的狀態方程:X=AX+BU(9)
系統的輸出方程:Y=CX+DU(10)
由于EPS的控制目標是改善汽車操縱的輕便和轉向的靈活性,所以選取汽車橫擺速度ωr和傳感器測量Tsw,其中(Tsw= Ks(θh- δ1,)作為輸出:

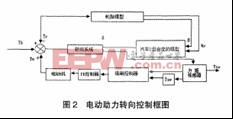
3模糊控制原理
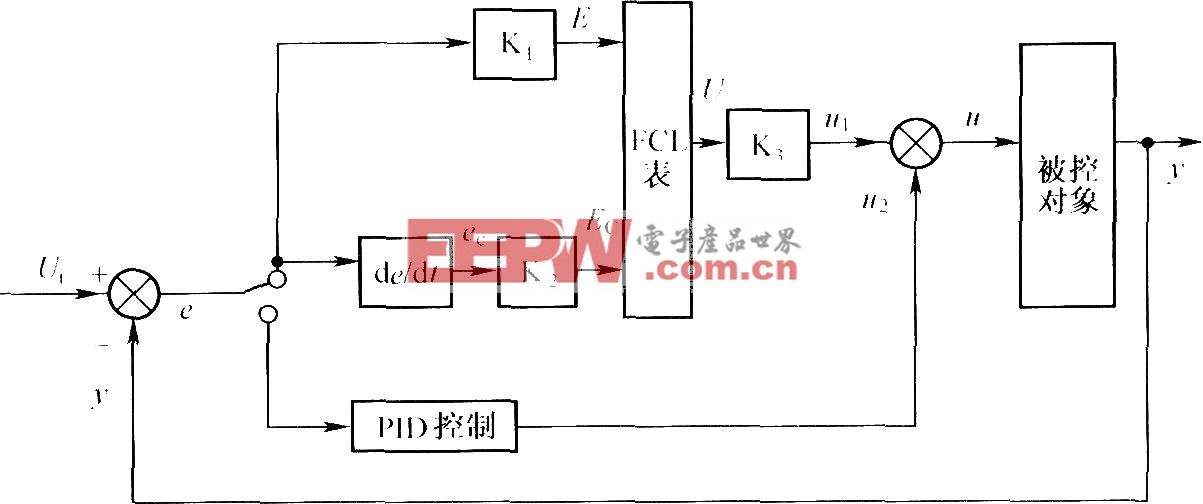
針對EPS設計了一種模糊自調整控制方案,具體方案如圖2所示。它由一個模糊自調整機構和一個PD控制器組成,模糊自調整機構根據輸入信號(即傳感器測得扭矩的大小、方向以及變化的趨勢等特征)決定使用兩個模糊表中的哪個,根據這一模糊表進行模糊推理作出相應決策,在線整定PD參數Kp,Kd,在線調整PD參數Kp、Kd,以期獲得滿意的控制效果。
在常規的模糊控制控制器中,量化因子![]() 和比例因子Ku是固定的。考慮在實際電動助力轉向系統中,當參數發生變化或受到隨機干擾影響時,常規模糊控制器將無法適應控制環境的變化,為保證有較好的轉向靈敏性和操縱穩定性,采用參數自整定模糊控制器,即在常規模糊控制器的基礎上選擇適當的調整算法在線整定
和比例因子Ku是固定的。考慮在實際電動助力轉向系統中,當參數發生變化或受到隨機干擾影響時,常規模糊控制器將無法適應控制環境的變化,為保證有較好的轉向靈敏性和操縱穩定性,采用參數自整定模糊控制器,即在常規模糊控制器的基礎上選擇適當的調整算法在線整定![]() ,以使系統性能達到預定要求。
,以使系統性能達到預定要求。
模糊PD控制器可根據切向力矩Tsw和其變化率![]() 決定電機輸人端的電壓大小,其關系式對于模糊控制器來說,定義A為方向盤切向力矩Tsw規范化后的變量,B為切向力矩變化率
決定電機輸人端的電壓大小,其關系式對于模糊控制器來說,定義A為方向盤切向力矩Tsw規范化后的變量,B為切向力矩變化率![]() 規范化后的變量,模糊集為{NB,NM,NS,Z0,PS,PM,PB};Tsw的論域為{-30,30};
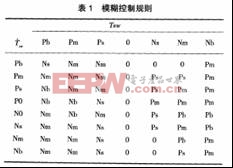
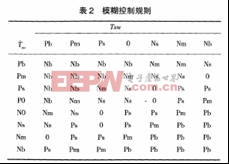
規范化后的變量,模糊集為{NB,NM,NS,Z0,PS,PM,PB};Tsw的論域為{-30,30};![]() 的論域為{-20,20};膜糊推理結果u的論域為{-5,5}.其隸屬函數為三角形隸屬函數本文設計了兩個模糊控制表1針對提高轉向系統輕便性,表2針對提高轉向系統的路感。
的論域為{-20,20};膜糊推理結果u的論域為{-5,5}.其隸屬函數為三角形隸屬函數本文設計了兩個模糊控制表1針對提高轉向系統輕便性,表2針對提高轉向系統的路感。
此外,在該控制系統中,采用一個修正因子函數a(t)來自動調整PD控制器參數Kp、Kd,用以改善系統性能。實際計算時,根據當前的變量值A和B,結合實際受控過程產生另一個模糊變量H(它是反映a (t)在動態過程中應具有的變化趨勢的模糊決策),然后H經非模糊化處理得h(t)1其在線調整按式(11)進行:

綜上所述,模糊自調整機構可根據輸人信號,即傳感器測得扭矩Tsw和其變化率Tsw的大小、方向及變化趨勢等特征,經規范化和模糊化后,由模糊規則表進行模糊推理,做出相應決策,在線整定PD參數Kp、Kd,以期獲得滿意的控制效果。
4 仿真及結果分析
4.1 仿真模型
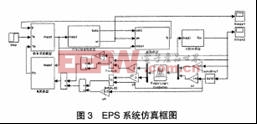
系統仿真框圖如圖3所示:
電動助力主要參數:
4.2 仿真結果分析:
對EPS系統,假設汽車在水平路面上勻速行駛,車速u=1 Okm/,轉向盤上作用4N.m的階躍轉矩的響應曲線。根據上述仿真模型在Simulink環境下進行了仿真,其仿真結果如圖4、圖5、圖6所示。
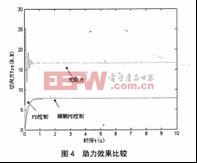
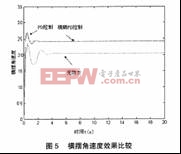
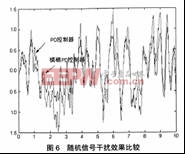
圖4中所示為汽車切向力的對比,采用EPS系統后,系統的切向力下降,說明輕便性很好。采用模糊PD控制過渡時間和超調量明顯減小。圖5所示為汽車橫擺角速度的對比,采用模糊自調整控制后,汽車橫擺角速度有所增加且達到穩定時間縮短,提高了汽車操作穩定性和靈敏度。圖6所示隨機信號干擾效果比較。其結果表明,模糊自調整PD控制比單獨的PD控制有更好的抗干擾能力。
5 結論
顯然,PD控制助力系統的輸出響應要比無助力系統平穩模糊自調整PD控制助力系統的輸出響應最為平穩,抗干擾能力較強。其仿真結果表明,這種模糊自調整PD控制器具有較好的控制效果和魯棒性,抗干擾能力顯著提高。通過對控制器中系數Kp和Kd的在線調整,這種模糊自調整PD控制器,較好地解決了轉向系統中的輕便與靈敏的矛盾,協調了汽車操縱輕便性和駕駛員能獲得充分路感的關系。
三維掃描儀相關文章:三維掃描儀原理

評論