MAX7456在可視倒車雷達中的應用

2 可視倒車雷達系統構成
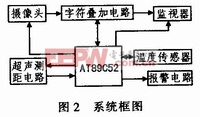
可視倒車雷達由視頻后視系統和超聲測距系統2大部分構成。視頻后視系統負責對車后視頻圖像進行采集及顯示,主要用于取代傳統的汽車后視鏡的功能,同時在本系統中還用來顯示超聲測距系統測得的車尾到障礙物的距離值。由單片機控制超聲波測距系統完成對車后障礙物的測距,并完成將測距值在監視器上的顯示操作。圖2所示為可視倒車雷達系統框圖,其中的字符疊加電路即為MAX74560。本文引用地址:http://cqxgywz.com/article/197521.htm
2.1 超聲波測距原理
考慮到汽車周圍環境復雜、輔助倒車系統所需測量距離短及成本限制等原因,目前倒車雷達大都采用超聲波進行測距。其基本原理是利用單片機控制超聲波探頭向車后發射一串超聲波脈沖,然后測量該脈沖遇到障礙物后返回的時間t,在已知聲波在空氣中傳播速度v時,根據公式:
![]()
即可計算出車尾到障礙物之間的距離。通常聲波在空氣中的傳播速度受氣溫的影響較大,因此必需對氣溫進行測量,然后根據聲波在空氣中的傳播速度公式:
![]()
進行修正,這樣才能得到較準確的距離值。在單片機控制系統中,因為要兼顧運算速度和測量精度的關系,常使用式(2)的近似表達式
![]()
進行運算,這樣就得到超聲波倒車雷達的距離測量公式:
![]()
由該公式可計算出車尾到障礙物之間的距離。
2.2 測距電路
根據車載超聲波雷達的工作特點及工作環境的要求,超聲波測距電路在設計時必需遵循以下原則:1)考慮到車載環境惡劣及布線方便,超聲波探頭必需選用全密封防水、防振型收發兩用專用探頭;2)超聲波探頭通常使用壓電陶瓷材料,其諧振頻率為40 kHz,且起動時有一定的惰性,因此不能采用單脈沖驅動,必須采用10~20個群脈沖驅動才能取得較好效果;3)由于超聲波基本沿直線傳播,單個探頭探測范圍有限,通常需要3~4個探頭才能完全覆蓋車尾。根據以上原則所設計的超聲波測距電路如圖3所示。
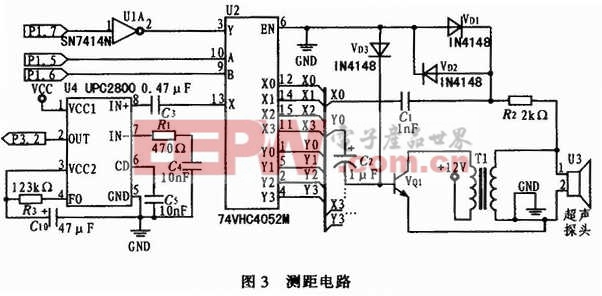
測距電路分發射和接收2部分,發射部分由SN7414、模擬電子開關HC4052的Y通道驅動4路超聲波探頭(圖3中僅畫出了其中一路)。超聲波探頭U3采用車用全密封防水、防振型收發兩用探頭,該探頭的工作電壓為120 V左右。為使其能夠正常工作,設計了由VQ1、T1、C2和VD3組成的驅動器。VQ1工作在開關狀態,T1為變比1:10的升壓變壓器,用于將12 V的驅動電壓升壓到120 V,VD3為C2提供放電通路。為防止在發射超聲波時的高電壓通過接收回路C1回串,燒毀HC4052模擬電子開關,在接收回路的輸入端接入由R2、VD1和VD2組成的保護電路,將輸入C4052的信號箝位在0.7 V。由于超聲波探頭接收到的正常回波信號通常只有幾十毫伏,因此保護電路對回波信號無影響。
超聲波測量采用循環工作方式,四路探頭的選擇由單片機通過P1.5、P1.6引腳控制HC4052來完成;測距時由單片機內部計數器控制,產生12個頻率為40 kHz,占空比為50%的脈沖信號,由P1.7引腳發出,通過發射電路送到選定的超聲波探頭中。
接收回路由超聲波探頭U3、HC4052的X通道和UPC2800構成。UPC2800為紅外接收器專用IC,內部集成有前置放大器、ABLC控制器、限幅放大器、帶通濾波器、檢波器和輸出整形電路。其帶通濾波器的中心頻率可在30~80 kHz之間調整,正好覆蓋40 kHz的超聲波應用頻率,因此本電路中用它完成對回波信號的放大、整形及檢波。UPC2800的8引腳為信號輸入腳。7引腳為前置放大器增益調整腳,其外接電阻可根據增益要求在0~1kΩ之間調整,串接的0.1μF電容用于隔直;3引腳為內部電源濾波電容接入腳,典型值為47μF;4引腳為內部帶通濾波器中心頻率調整腳,當外接電阻值為123 kΩ時,濾波器的中心頻率為40kHz;6引腳為檢波器濾波電容連接端子,其外接濾波電容典型值為O.1μF。檢波完成后的脈沖信號由2引腳輸出,送單片機的P3.2用作中斷控制信號。

存儲器相關文章:存儲器原理
負離子發生器相關文章:負離子發生器原理 電容傳感器相關文章:電容傳感器原理 晶振相關文章:晶振原理 攝像頭相關文章:攝像頭原理 燃氣報警器相關文章:燃氣報警器原理




評論