基于PIC16F877A的永磁無刷直流電機的控制器設計

摘要:隨著科技的發展,對無刷直流電動機的性能提出更高的要求。本文在研究無刷直流電動機數學模型、導通方式的基礎上,以單片機PIC16F877A為核心設計控制系統硬件電路和軟件程序,硬件電路包括電機轉子位置檢測電路、PIC16F877A最小系統、轉子位置檢測電路、IGBT驅動保護電路和系統信息反饋電路,并利用MPLAB軟件編譯平臺編寫控制系統軟件程序。通過對實驗結果的分析:可知本文所設計的控制系統性能可靠、結構簡單,能夠實現對無刷直流電機的可靠控制。
本文引用地址:http://cqxgywz.com/article/201610/306809.htm電動機是將電能轉換為機械能的常用裝置,按照工作原理將電動機分為直流電動機和交流電動機。直流電動機具有平滑穩定的調速特性和優良的啟動性能,所以在需要頻繁啟動和速度變化要求較高的場合如機床、風力發電機、軌道列車、和軋鋼場等設備上有廣泛應用。但傳統直流電機轉子換相過程依靠電刷和換向器直接的配合,換相過程會產生火花和電磁干擾,對周圍電氣設備的電磁兼容造成很大影響,同時,電刷屬于易耗器件,需要定期檢查和更換,消耗大量人力資源和原材料的浪費。為了解決上述問題,很多專家、學者對無刷直流電機開展大量研究工作。
無刷直流電動機作為機電一體化的典型產品,具有傳統直流電動機的調速特性好、運行穩定,又具有交流電動機結構簡單、便于維護的優點,所以在部分領域得到初步應用。稀土材料的發展使得無刷直流電動機得到進一步的發展,但采用稀土材料制成的無刷直流電動機成本過高,僅應用在航空、航天和軍用等高科技領域。20世紀80年代釹鐵硼永磁材料出現后,大大降低了無刷直流電動機的成本,為無刷直流電動機其在民用領域的應用提供可能,從幾十瓦至上百瓦的無刷直流電動機在汽車、機床、儀器儀表和石化化工等等民用領域初顯身手。
隨之電力電子技術和現代控制理論的快速發展,使得電動機技術獲得跨越性的變化,電機制作工藝和控制理論不斷成熟,關于無刷直流電動機控制技術研究是當今高校和科研單位研究的熱點。本文在對無刷直流電機數學模型、運行過程和主回路導通方式研究的基礎上,基于PIC16F877A設計了無刷直流電機控制系統,主要包括PIC16F877A最小系統、轉子位置檢測電路、IGBT驅動保護電路和系統信息反饋電路,并利用MPLAB軟件編譯平臺編寫控制系統軟件程序。
1 無刷直流電動機
1.1 永磁無刷直流電機
永磁無刷直流電動機利用電與磁之問的關系,在電動機轉子上裝有永磁材料,定子上纏繞三相線圈,線圈通電時產生電磁場,電磁場和永磁體磁場之間相互作用使電機旋轉,隨之轉子的旋轉三相繞組線圈換相,為電動機旋轉提供持續轉矩。永磁體采取徑向充磁的瓦形稀土永磁體。電動機定子三相繞組采用星型連接方式,處理器檢測轉子的位置,定子根據微處理器發送的信號進行換相,保證電機持續旋轉。
1.2 無刷直流電動機數學模型
分析時對理想的永磁無刷直流電動機作如下假設:
1)電動機定子三相繞相之間完全對稱,氣隙磁場為方波,定子電流和轉子磁場分布的磁場為對稱方波。
2)忽略電動機齒槽、換相過程和電樞反應等造成的影響。
3)電樞繞組在定子的內表面上的分布方式為連續均勻的。
4)電動機定子電流為三相對稱1 200(電角度)的矩形波,定子繞組為600相寬的集中整矩繞組。
為了減小轉矩產生紋波,永磁無刷直流電動機的氣隙磁密波形應該和供電電流的波形相同。在理想狀態下,矩形波定子電流和相同波形的氣隙磁通相互作用,兩者相結合產生恒定的電磁轉矩。
1.2.1 電壓方程
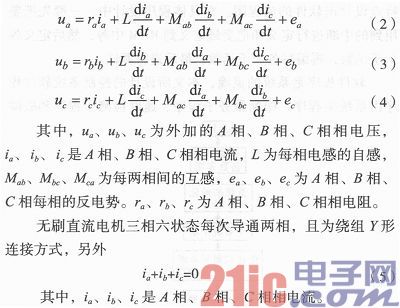
根據電動機電壓平衡方程
式中,U表示三相繞組中的電壓,r表示每相繞組的電阻值,i表示運行時每相繞組中的電流,L表示每相運行電感,E表示每相反電動勢。有公式(1)可得運行時的無刷直流電動機電壓方程:
1.2.2 轉矩方程
在電磁轉矩上無刷直流電機和普通直流電機相似,電磁轉矩和磁通、電流幅值成正比變化,即:
Te=Pn(eaia+ebib+ecic)/ωr (6)
其中,Te為電動機的額定轉矩,Pn為電動機的極對數;ωr為電動機的角速度;ia、ib、ic是A相、B相、C相相電流;ea、eb、ec為A相、B相、C相每相的反電勢。無刷直流電動機(忽略轉動時的粘滯系數)的方程可寫為:
其中,Te為額定轉矩,TL為負載轉矩,J為電機轉軸上的轉動慣量的總和。ω為機械角速度。
1.3 主回路導通方式
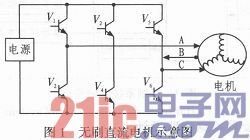
三相半控和三相全控是無刷直流電機控制系統主回路控制方式的基本類型,無刷直流電機示意圖如圖1所示。三相半控電路采用3個功率器件控制繞組的導通方式,每個繞組由一個功率開關控制,一個周期只有1/3時間導通,另外2/3時間不通電,繞組沒有得到充分的利用。三相全控電路采用6個功率器件控制繞組的導通方式,同一時刻至少有兩相繞組導通,繞組得到充分利用,所以我們采用三相全控式電路。
在三相無刷直流電機全控式控制系統中,繞組導通方式常見的有兩兩導通方式和三三導通方式。采用在兩兩導通方式時,每個時刻都有不同橋臂的兩個功率器件導通,定義流人繞組的電流產生的力矩方向為正Ta,則流出(另一個繞組)電流產生的力矩方向為負Ta,則它們的合成力矩為3Ta,如圖2(a)所示。
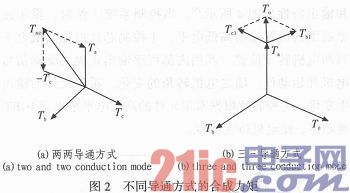
采用在三三導通方式時,每個時刻都有不同橋臂的3個功率器件導通,相鄰兩次換相的電角度為600,功率器件導通的電角度為1 800。如果認定流入繞組的電流產生的力矩方向為正Ta,則流出(另一個繞組)電流產生的力矩方向為負Ta,則它們的合成力矩為1.5Ta,如圖2(b)所示。
從上面的分析可以看出,對于三相Y接高壓斷路器無刷直流電機,為了獲得較大的輸出力矩,主回路通電方式采用兩兩導通方式更適合。
2 系統的硬件設計
2.1 硬件的結構
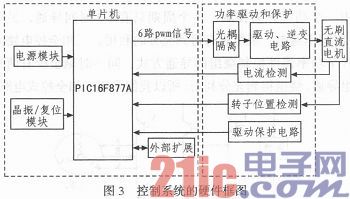
基于PIC16F877A的無刷直流電機控制系統硬件框圖如圖3所示,控制系統分為單片機最小系統、控制電路和控制對象三部分,其中單片機最小系統是指以PIC16F877A為核心包括電源模塊、晶振復位模塊和外部擴展模塊,控制電路包括光耦隔離電路、驅動逆變電路、電流檢測電路、轉子位置檢測和驅動保護電路,控制對象為永磁無刷直流電動機。PIC單片機最小系統為單片機提供工作所需的電源、時鐘信號、復位信號、和存儲器擴展。控制電路控制電動機繞組在合適的位置換相、驅動電動機持續運行,同時檢測系統參數,保證系統可靠穩定運行。
2.2 轉子位置檢測電路設計
霍爾傳感器的工作原理是半導體器件的霍爾效應,是無刷直流電機換相控制中應用較多的位置傳感器。根據霍爾元件的特性不同分為線性霍爾元件和開關型霍爾元件,線性霍爾元件輸出時一個和磁場成正比的連續信號,常用于連續量如位移等的測量,開關型霍爾元件的輸出時一個根據磁場強弱而變化的高低電平信號,常用作無刷直流電機的位置傳感器。根據控制系統實時性要求及安裝方便,本控制器采用鎖存型霍爾元件作為電機轉子位置傳感器。
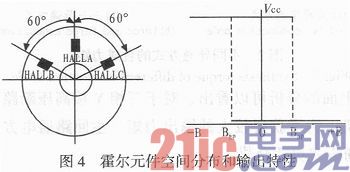
根據電機內部電磁場分布,將3個霍爾傳感器安裝在霍爾盤上,相鄰兩個之間的夾角為60°。由于在電機內部不易安裝霍爾盤及拆卸不方便,故將其安裝在電機的外部,制作一個圓形磁鋼模擬電機內部電磁場分布,霍爾元件的空間分布和輸出特性如圖4所示。當控制系統工作時,霍爾元件根據磁鋼的位置輸出高低電平,主控制芯片根據高低電平信號判斷電機轉子位置,調用內部程序輸出正確的驅動信號,使電機開始動作。隨之電機轉角的變化,霍爾元件的輸出也發生變化,主控芯片根據霍爾元件的高低電平來確定IGBT的導通順序,使電機持續旋轉。
2.3 IGBT驅動保護電路設計
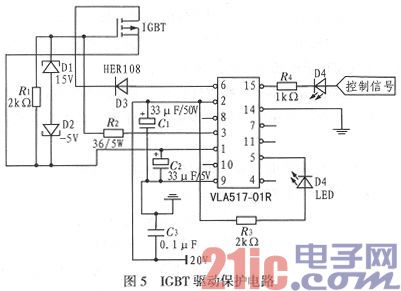
根據系統需求,設計IGBT隔離驅動電路是功率驅動電路的關鍵。VLA517—01R是替代EXB841的快速型IGBT集成驅動芯片,整個電路延遲時間不超過1μs,最高工作頻率達40~50 kHz,只需外部一個20 V電源供電,內部可產生一個正驅動電壓及反向截止電壓,模塊內部含有過流保護和故障信號輸出電路。EXB841輸入端15和14管腳有10 mA的電流流過時,內部光耦導通,3腳輸出驅動電壓使IGBT導通,驅動信號截止,光耦截止,3腳輸出反向電壓使IGBT截止。本文所設計的IGBT驅動保護電路如圖5所示。
3 軟件設計
PIC單片機仿真器提供存儲器和時鐘,并能運行代碼,即使沒有與目標應用板相連。在開發和調試期間,ICE提供了最強大的能力來發揮系統的所有功能,這樣允許用戶對應用方便地進行測試、調試和再編程。控制器硬件電路設計完成以后,接下來是軟件編制工作。在軟件設計過程中,一般首先根據實際情況理清程序的運行過程,在結合硬件電路的特點設計出軟件的流程圖。在具體程序設計中,一般先把要用到的中斷進行定義和把變量定義到RAM中等,然后定義各個子函數,再編寫各個子函數,最后進行調試。
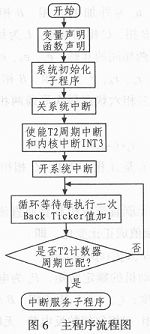
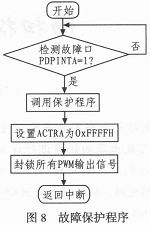
軟件程序是系統的靈魂,本文所設計的控制系統軟件程序由系統主程序、中斷服務子程序、速度檢測子程序和故障保護子程序組成。主程序中設定了系統的中斷信號由PIC單片機的事件管理器T2定時器的周期中斷來觸發,當T2周期匹配時,調用中斷服務子程序,通過速度檢測子程序將檢測量作為反饋值與設定的速度值比較,調節PWM的占空比,實現電機速度的調節。故障保護子程序檢測系統的電壓、電流和溫度,與給定安全值進行比較,當發成故障時,發出錯誤警報并封鎖控制信號輸出,實現對控制系統的保護主程序、中斷服務子程序和故障保護子程序如圖6~8所示。

4 控制系統與電機試驗
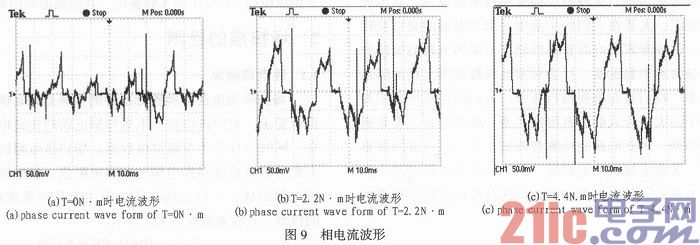
將設計好的系統與電機聯機實驗,電機的額定功率為900 W,額定電壓為150 V,額定負載為4.31 N·m。通過示波器TDS1012觀察發現實際運行狀態下的霍爾反饋信號和理論分析結果完全一致,控制器的三路霍爾位置信號為空間上相差1200電角度的矩形波。實驗過程分別測量負載轉矩為0N·m、2.2 N·m和4.4 N·m時電機電流,如圖9所示。從圖可知:電機的電流曲線近似于正玄波,本文所設計的控制系統能夠在不同負載情況下驅動無刷直流電動機動作,系統可靠性強、穩定性能好。
5 結論
文中以PIC16F877A單片機為核心設計了無刷直流電動機控制系統,包括PIC16F877A最小系統、轉子位置檢測電路、IGBT驅動保護電路和系統信息反饋電路等,并編寫控制系統軟件流程。通過試驗驗證本文所設計的控制系統能夠可靠驅動無刷直流電機可靠運行。











評論