基于1553B總線的航天大功率電動舵機控制器設計

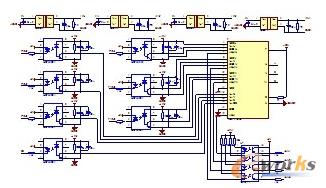

圖3IPM功率驅動模塊電路連接圖
轉子位置檢測電路
轉子位置及轉速檢測采用旋轉變壓器與解碼芯片組合方案。采用多摩川TS2620N21E11旋轉變壓器,入力電壓AC7Vrms10KHz,變壓比0.5±5%,誤差精度最大±10′。解碼芯片選用飛博爾的12位分辨率旋轉變壓器——角位速度數字轉換器FB9412PB,該轉換器具有10kHz激勵電源輸出,直接將旋轉變壓器輸出的正余弦模擬信號轉換為角度和速度數字信號,并以并行口方式輸出,數據分辨率為5.3′,精度達到±7.8′,最大跟蹤速度1000rps。FB9412PB與旋轉變壓器的端子連接如表1所示。

電流檢測電路
采用LEM的HMS20-P霍爾電流傳感器檢測相電流,測量范圍±60A,輸出電壓范圍2.5V±(0.625×/20)V,響應時間小于5us。電路原理如圖所示,將LEM的輸出Vout和參考輸出Vref經過集成運放OP27以3:4比例縮小后接入DSP的ADCINA0和ADCINB0端,兩者相減可以減小溫度影響以及測量誤差。
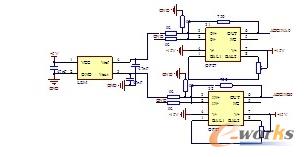
圖4 LEM電流檢測電路連接圖
偏角檢測電路
電動舵機通過傳動齒輪箱和滾珠絲缸將無刷直流電機的旋轉運動轉換為直線運動,推動噴管擺動,通過測量滾珠絲缸的位移量就可以確定噴管擺動角,選用德國海德漢公司生產的EQN425多圈絕對值編碼器,轉數為4096,每轉位置數8192(13bits),計算時間0.5us,精度為,編碼類型為格雷碼,輸出信號為同步串行信號(SSI)。SSI接口轉并口模塊選用SSI208P,該模塊自動將同步串行接口信號(SSI)轉換成8位并口數據,數據更新率大于100KHZ。
限位保護電路
最大限位保護電路通過安裝在電機絲缸正反向最大行程處的限位開關實現,選用海立Z15G1微動開關。當絲缸運動到最大行程處時,對應開關接通,故障信號傳遞給DSP芯片中斷口,直接關斷六路PWM。
3 軟件設計
控制系統軟件設計主要包括兩部分內容:DSP主控程序設計和FPGA邏輯控制程序設計。DSP程序采用C語言編寫,通過CCS3.3編譯。FPGA采用Verilog語言編寫,通過QuartusⅡ編譯。

評論