基于1553B總線的航天大功率電動舵機控制器設(shè)計

3.1 DSP主程序設(shè)計
DSP主要實現(xiàn)了控制系統(tǒng)主程序和電流、位置、速度三閉環(huán)數(shù)字PID控制算法。FPGA將接收到的舵面偏轉(zhuǎn)信號和采集到的轉(zhuǎn)子位置、轉(zhuǎn)速和實際舵面偏角傳遞給DSP,DSP結(jié)合自身ADC采樣電流信號,通過算法處理,輸出調(diào)制PWM。程序流程如圖5所示。
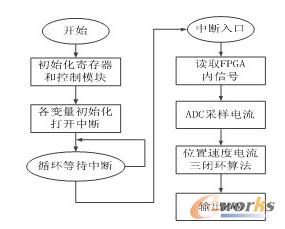

圖5DSP主程序流程 3.2 FPGA邏輯程序設(shè)計
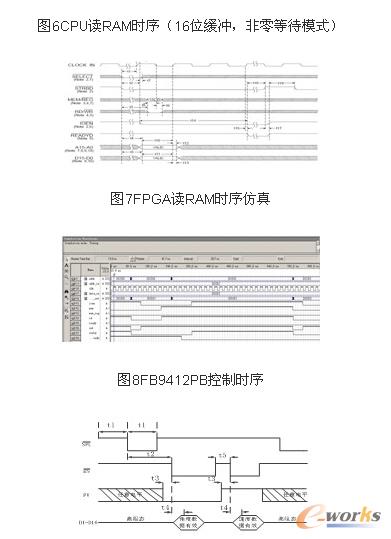
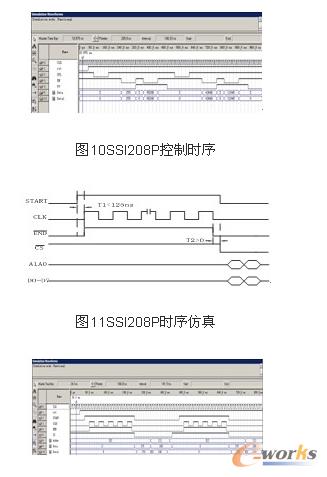
FPGA程序采用模塊化設(shè)計思想,實現(xiàn)了BU-61580讀寫RAM控制時序、FB9412PB控制時序、SSI208P控制時序和DSP接口控制邏輯。各個模塊的時序控制如圖6-11所示。
4 結(jié)論
本文設(shè)計實現(xiàn)了一套基于1553B總線通訊的大功率無刷直流電動舵機控制器,利用DSP高速運算性能實現(xiàn)電流、速度、位置三閉環(huán)控制算法,充分運用FPGA靈活可配置性設(shè)計時序邏輯控制電路,采用BU-61580協(xié)議芯片實現(xiàn)1553BRT終端控制器。實際應(yīng)用表明,該控制器控制精度高、調(diào)節(jié)速度快,具有良好的工程應(yīng)用價值。

評論