基于1553B總線的航天大功率電動舵機控制器設計

引言
目前,隨著導彈武器射程、速度、飛行高度和機動性的不斷增加,電動舵機系統正向著輸出力矩大、響應速度快、功率大、體積小、集成度高、全數字化方向發展。無刷直流電動機不僅保持了傳統直流電動機良好的動、靜態調速特性,且結構簡單、運行可靠,已經在國防、航空航天等領域中得到了較好的應用。
MIL-STD-1553B總線作為一種具有較高數據傳輸性能和管理效率、傳輸可靠的數據總線,已經發展成熟并被廣泛應用于航空航天、武器裝備等復雜控制系統中。
本文以大功率無刷直流電動舵機為對象,設計了一套基于DSP+FPGA的數字化高精度、高可靠性的控制器,并且實現了1553BRT終端接入功能。
1 舵機系統總體設計方案
舵機系統采用位置、速度、電流三閉環控制策略,總體硬件設計如圖所示。具體工作過程如下:DSP通過1553B通訊模塊與主控計算機之間進行可靠通信,通過轉子位置和舵面偏角檢測電路獲取轉子位置、轉速以及舵面實際偏角信號,結合自帶ADC模塊采樣得到相電流,通過三閉環控制算法處理,輸出調制PWM信號作用于功率驅動電路,驅動無刷直流電機轉動。利用FPGA的靈活可配置性設計硬件邏輯電路實現對各主功能芯片的時序控制,包括1553B通訊模塊、轉子位置及轉速檢測電路和舵面偏角測量電路,大大減少了DSP軟件開銷,提高了CPU工作效率。
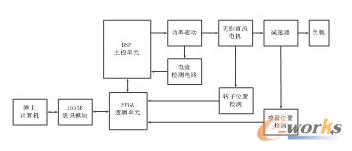

圖1舵機系統總體硬件結構圖
2 硬件電路設計
2.1 DSP主控單元
主控制器采用美國TI公司的32位定點數字信號處理器TMS320F2812。該芯片采用哈佛總線結構,將數據總線和程序總線分開,每秒可執行1.5億次指令(150MIPS),具有單周期32X32位的乘與累加運算(MAC)功能。針對電機控制應用,片內集成了兩個功能強大的事件管理器(EVA、EVB),16通道的高速ADC模塊。
邏輯控制單元
FPGA邏輯功能芯片選用Altera公司的CycloneII系列EP2C8T144C8。CycloneII是基于StratixII的90nm工藝推出的FPGA芯片,具有8256個邏輯單元(LE),內置36個M4KRAM塊,2個鎖相環(PLL)以及18個乘法器模塊,提供給用戶85個可用的IO管腳接口。該芯片主要配合DSP使用,實現邏輯控制功能。
總線通訊模塊設計
選用DDC公司的BU-61580[5]作為1553B總線通信協議芯片。該芯片內部集成有數字協議控制電路,雙路總線收發器等模塊,FPGA只需要操作協議芯片的17個常規寄存器和4KX16bit的RAM,全部通信過程協議芯片都能自動完成。BU-61580與FPGA的電路連接如圖所示。利用74LVC4245芯片進行邏輯電平匹配,TRANSPARENT/BUFFERED拉低將BU-61580設置為16位緩沖工作模式,FPGA直接使用芯片內部4KX16bit共享RAM。
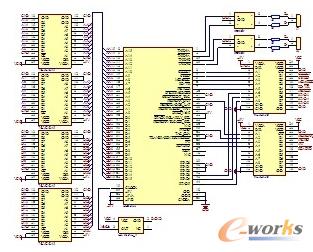
圖2BU-61580與FPGA的電路連接圖
功率驅動模塊設計
功能驅動模塊采用Fuji公司的7MBP75RJ120,該IPM模塊能耐受高達1200V電壓,75A電流,內部設有電源欠壓、過熱保護、過流保護和短路保護功能。具體電路連接如圖所示。DSP輸出六路PWM信號經過高速高共模比的光耦芯片HCPL-4504驅動IPM內部的IGBT,進而控制無刷電機的三相電壓U、V、W。故障信號通過光耦芯片TLP521-1傳遞給DSP中斷口,電源供電采用4個獨立的WRB0515直流電源模塊。

評論