非接觸式機器人測控系統的開發

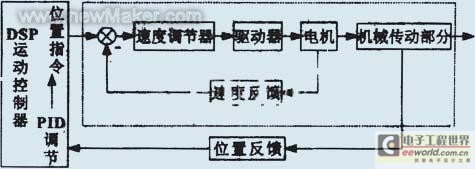
圖3 單軸伺服系統
(6)測量系統X、Y、Z和W四個軸的讀數,都是由控制計算機讀取,并傳給主計算機。攝像測頭具有相對的獨立性,為便于其開發以及與整個測量系統軟件的連接,將運動控制與圖像采集分開:運動控制通過控制計算機實現,圖像采集則直接由主計算機實現。激光測頭的運動控制和數據采集均由控制計算機完成。
3.2 控制系統軟件
3.2.1 軌跡規劃和測量控制軟件體系
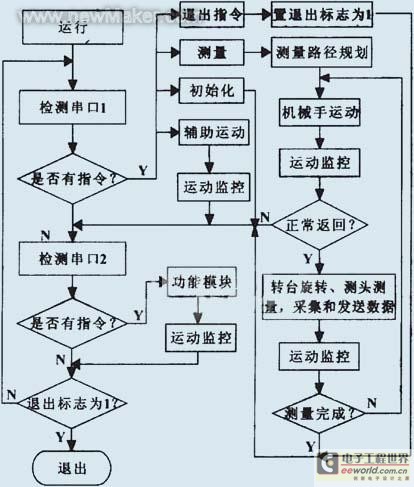
圖4 運動控制軟件流程
(1)通訊模塊。負責管理控制計算機與主計算機、控制盒的通信。其中,主計算機使用串口1,控制盒使用串口2。當接收到指令時,產生中斷,置指令標志。主程序通過檢測該標志,判斷是否有指令。
(2)主測量模塊。主要完成測量路徑規劃及實現專用測量功能,包括內球面的測量控制、外球面的測量控制、圓柱的測量控制、平面的測量控制、表面缺陷等的測量控制,系統參數的標定測量控制,同時還負責控制機構點對點的運動等功能。
(3)初始化模塊。主要對系統參數、標志位、通信端口和測量系統等進行初始化。
(4)輔助功能模塊。測量機回零、復位、工件調偏、單軸運動、三軸聯動和隨動等。
(5)運動狀態監控模塊。主要是測量機軟硬件限位、DSP運動控制器初始化、系統參數和電機運行狀態等的監控。一旦檢測到錯誤,則停止當前測量,向主計算機發送報警信息和出錯原因,便于用戶調整,保證了測量機運行的安全性。
(6)數據采集模塊。主要負責對數據采集卡的初始化和測頭、關節編碼器數據的實時采集與處理。
3.2.2 系統監測軟件
為了保障測量系統的安全性和可靠性,必須對運動進行監控。運動監控的流程如圖5所示,主要包括主計算機、操縱盒停止指令監控、測量機運動狀態監控。
測量機運動狀態的監控的功能主要是測量機軟硬件限位、DSP運動控制器初始化、系統參數和電機運行狀態等的監控。一旦檢測到錯誤,則停止當前測量,向主計算機發送報警信息和出錯原因,便于用戶調整。運動監控保證了測量機運行的安全性,是運動控制中非常重要的模塊。
4 系統標定
4.1 系統標定
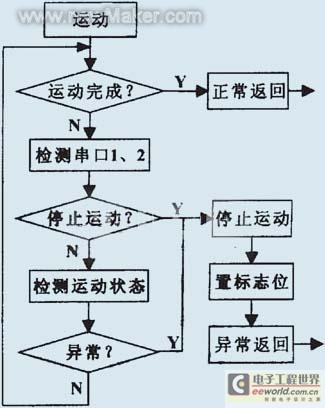
圖5 運動監控流程
4.2 系統測試
該機器人測控系統成功地應用在球殼體工件幾何尺寸及其表面形貌的無損測量中,表1是對某半球的測量結果。表中的數據表明該測控系統的具有較高的測量精度和可靠的穩定性。
表1 
本文介紹了一種新型的測控系統,該測控系統將機器人技術、非接觸測量技術和主從控制相結合,實現了幾何量測量和缺陷識別。系統本身具有一定的先進性和廣泛的應用前景。經測試該測控系統的具有較高的測量精度和可靠的穩定性。為了進一步提高系統的穩定性和測量精度,更深入的研究和實驗正在進行中。(end)

評論