誰會是AGV未來主流的導航方式?

AGV在智能工廠、智能倉儲上得到了廣泛應用,技術上獲得了迅猛發展,衍生出了多種導航方式,不同的導航方式有何特點?誰會成為未來主流的導航方式呢?
本文引用地址:http://cqxgywz.com/article/201804/378728.htmAGV簡介
AGV即自動導向小車(Automated Guided Vehicle),因具有良好的柔性和較高的可靠性,能夠減少工廠對勞動力的需求,提高產品設備在運輸中的安全性且安裝容易,維護方便,已經廣泛的應用于自動化倉儲系統、智能工廠、智能生產等領域。
圖 1 AGV工作場景
在應用環境中,往往由多臺AGV組成自動導向小車系統,該系統通過WIFI或其他傳輸鏈路,控制AGV動作。主要控制功能包括:地圖管理、路徑導航、路徑規劃、AGV導航控制、任務分配等。

圖 2 AGV控制系統軟件結構
AGV導航方式
所謂AGV導航方式是指決定其運行方向和路徑的方式,它不同于前面所說的一般通信。常用的導航方式分兩大類:
車外預定路徑方式:是指在行駛的路徑上設置導航用的信息媒介物,AGV通過檢測出它的信息而得到導向的導航方式,如視覺二維碼、磁帶導航、電磁導航等;
非預定路徑(自由路徑)導航方式:是指在AGV上儲存著布局上的尺寸坐標,通過識別車體當前方位來自主地決定行駛路徑的導航方式,如激光導航、SLAM方式(Simultaneous Localization And Mapping)。什么是SLAM?一張圖帶你認識它,機器人之思考既是SLAM需要解決的問題。
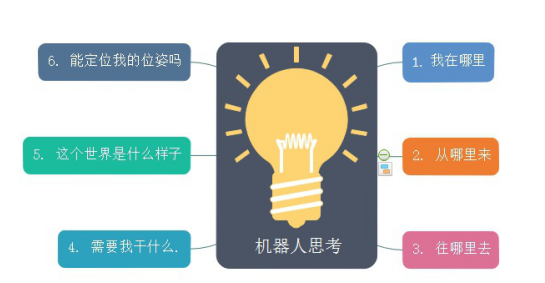
圖 3 SLAM需要解決的問題
AGV根據不同的應用場景已衍生出了多種導航方式,每種導航方式也許都存在相應的優劣勢,但均能找到自己的“用武之地”。
AGV導航方式分析
早期的AGV多是用磁帶或電磁導航,這兩種方案原理簡單、技術成熟,成本低,但是改變或擴展路徑及后期的維護比較麻煩,并且AGV只能按固定路線行走,無法實現智能避讓,或通過控制系統實時更改任務。
目前AGV主流的導航方式是二維碼+慣導,這種方式使用相對靈活,鋪設或改變路徑也比較容易,但路徑需要定期維護,如果場地復雜則要頻繁的更換二維碼,另外對陀螺儀的精度及使用壽命要求嚴格。

圖 4 視覺二維碼導航
隨著SLAM算法的發展,SLAM成為了許多AGV廠家優先選擇的先進導航方式,SLAM方式無需其他定位設施,形式路徑靈活多變,能夠適應多種現場環境。相信隨著算法的成熟和硬件成本的壓縮,SLAM無疑會成為未來AGV主流的導航方式。
SLAM大概分為激光SLAM(2D或3D)和視覺SLAM兩大類。
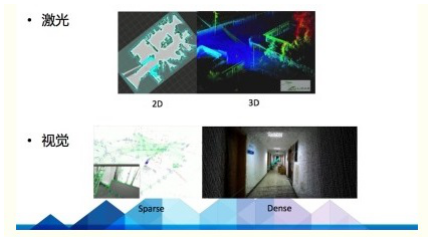
圖 5 SLAM分類
視覺SLAM目前尚處于進一步研發和應用場景拓展階段。視覺SLAM因為信息量大,適用范圍廣等優點受到了廣泛關注,但是算法對處理器的要求較高,一般需要準桌面級的CPU甚至GPU,但是AGV用的多是嵌入式處理器,所以短時間很難在小型的AGV設備上大規模應用。
圖 6 視覺SLAM導航
激光SLAM比視覺SLAM起步早,理論和技術都相對成熟,穩定性可靠性也得到了驗證,并且對于處理器的性能需求大大低于視覺SLAM,比如主流的激光SLAM可以在普通的ARM CPU上實時運行,目前有的AGV廠家已經推出了基于激光SLAM導航的產品。無疑在一段時間內激光SLAM還是主流的SLAM方案。

圖 7 激光SLAM導航
ZLG致遠電子推出的M6708核心板,搭載freescale l.MX6系列雙核/四核Cortex-A9處理器,1G主頻,支持硬浮點運算,能夠處理多任務執行,外接激光雷達測距傳感器,配合SLAM算法,可智能識別外部環境,實現精準快速建立環境地圖,規劃全局路徑。

圖 8 M6708核心板接口資源
另外針對AGV行業ZLG致遠電子還提供完整的無線聯網方案和電源解決方案,有想要了解詳細的AVG小車系統解決方案,歡迎一起來交流探討。

圖 9 AGV無線聯網方案








評論