SPWM波控制逆變器雙閉環PID調節器的建模與仿真

圖5 單相逆變器主拓撲結構圖
其中,B1、B2、B3、B4分別代表四相SPWM波形驅動波形,+BUS、0分別表示圖1中的Ud/2和N,C1和C2之間的電壓即位圖1中的U1。3.2 負載電路建模
負載分為阻性載和整流載,為了更好的驗證PID調節器的性能,在此假定整流載和阻性載同時存在,然后中間用開關來控制所帶的負載特性。負載建模如圖6所示。

圖6 負載(阻性載和整流載可選)
當手動開關位于1時,負載特性為整流載。反之,當手動開關位于0時,負載特性為阻性載。圖6中,D1為開關信號,D2、D3為連接到輸出端的連接端口。
3.3 閉環控制電路以及輸出電路建模
閉環控制電路的模型如圖7所示。圖7中;模擬示波器1中的1端口為輸出端C1和C2未經過電容濾波而得到的輸出電壓,2端口為輸出端C1和C2經過電容濾波后得到的輸出電壓,3端口為輸出電壓經過一個增益器之后所得到的對應的輸出電壓,4端口為系統輸出電流,5端口為控制負載特性選擇的開關信號。仿真波形如圖8所示。
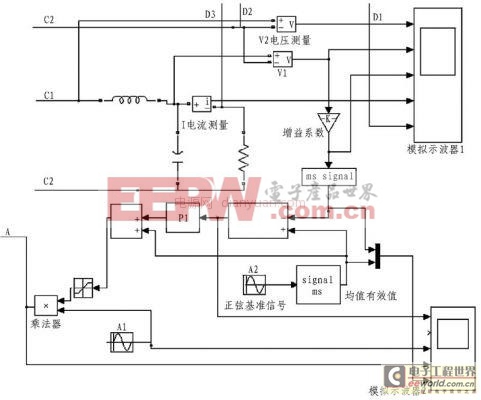
圖7 閉環控制電路
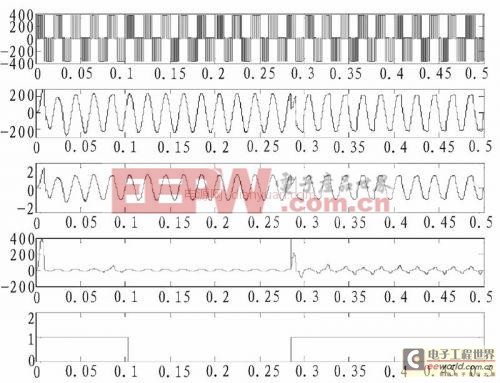
圖8 輸出端口電壓仿真波形根據圖4提出的控制策略,輸出電壓經過一個均值器之后與系統所要求得到的信號進行比較,比較后的差值經過PID調節(電壓瞬時內環調節),同理,可以建立電壓均值外環控制模型。
在上述模擬示波器2中,1端口為第一次PID調節器之前的差值Errorl,仿真波形如圖9所示。
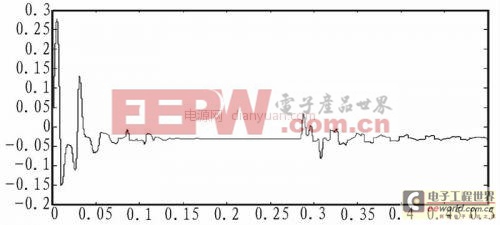
圖9 經過PID調節器之前的差值信息波形
通過圖8,可以很明顯的看到,當負載特性發生變化時,電流波形和輸出電壓波形會發生明顯的變化。當負載為阻性載時,輸出電壓電流均為正弦信號。當負載為整流載時,輸出電壓電流信號出現一定的失真。
如圖9所示,在最開始進入調節器時,輸出電壓與實際要求的電壓差值很大,但在閉環中,經過PID的多次調節之后,可以很清楚的看到最后兩者之間的差值穩定趨近于0.從開始到最后趨近于0的整個動態過程反應了PID調節器的調節快慢,穩定等參數,從上圖可以清楚的看出此調節器的魯棒性強,動態響應快。
4 將建模思想移植到實際電路中
建模的目的主要是為了驗證設計的方案是否可行,如果可行,便可以設計硬件電路來實現此方案,可以花最少的代價來完成控制器的設計。
硬件平臺:DSP2812+10K高頻UPS模塊
根據實際經驗修改PID的參數,使輸出能夠在最快最穩的情況下達到預定值。
通過實際的調試,瞬時環中:P=0.6,I=0.04,均值環中,P=0.3,I=0.072,D=0.001.此時系統穩定,實際的輸出波形如圖10所示。
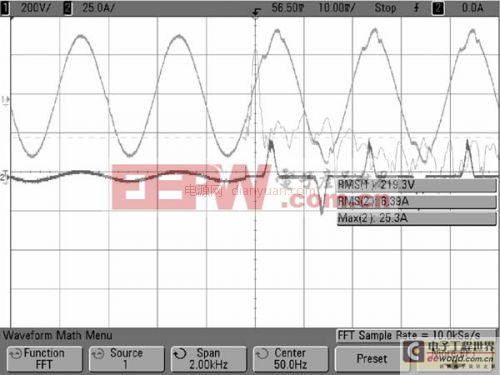
圖10 實際電路中輸出電壓與電流信號
實際要求輸出電壓為220V,負載采用的是整流載。上圖是阻性載往整流載切換時的輸出電壓與輸出電流波形圖。

逆變器相關文章:逆變器原理
pid控制相關文章:pid控制原理
逆變器相關文章:逆變器工作原理
pid控制器相關文章:pid控制器原理



評論