基于DSP高精度伺服位置環設計 作者:暨綿浩 廣州數控設備有限公司 時間:2009-06-15 來源:電子產品世界 加入技術交流群 掃碼加入和技術大咖面對面交流海量資料庫查詢 收藏 <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 離散PID控制算法如下:本文引用地址:http://cqxgywz.com/article/95275.htm 式中,為飽和前的輸出,KP為PID控制的比例增益,Ti為PID控制的積分時間常數,Td為PID控制的微分時間常數,Kc為退飽和時間常數。 位置控制器的控制算法 位置控制器采用比例加前饋控制結構,如圖3所示,其中Gm為電機的傳遞函數,Gspd為速度環的傳遞函數,Gpos為位置環的傳遞函數,Fpos為位置前饋控制器傳遞函數。 系統的傳遞函數為: pid控制器相關文章:pid控制器原理 上一頁 1 2 3 4 5 6 下一頁
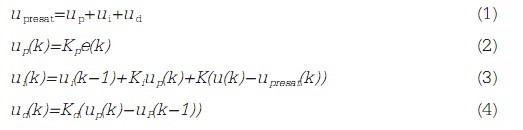
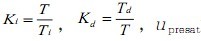 為飽和前的輸出,KP為PID控制的比例增益,Ti為PID控制的積分時間常數,Td為PID控制的微分時間常數,Kc為退飽和時間常數。
為飽和前的輸出,KP為PID控制的比例增益,Ti為PID控制的積分時間常數,Td為PID控制的微分時間常數,Kc為退飽和時間常數。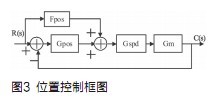













評論