基于DSP高精度伺服位置環設計

當Fpos(s)=1/(Gspd(s)Gm(s))時,H(s) =1,則可使輸出完全復現輸入信號,且系統的暫態和穩態誤差都為零。其中當速度調節器采用PI控制時,在位置環的截止頻率遠小于速度環的截止頻率時,速度環可等效為一個慣性環節,電機可等效為一個積分環節,于是Fpos(s)可以看成加速度前饋和速度前饋兩部分[5],其中:位置前饋中加速度項差分方程:
本文引用地址:http://cqxgywz.com/article/95275.htm![]()
式中R(k)為第K個采樣周期中的位置給定信號;Yaf為第K個采樣周期中加速度信號的輸出,Kaf為加速度前饋比例系數。
位置前饋中速度項差分方程:

式中R(k)為第K個采樣周期中的位置給定信號;Yaf為第K個采樣周期中速度信號的輸出,Ksf為速度前饋比例系數。
相應的位置環P的差分方程:
![]()
式中R(k)為第K個采樣周期中的位置給定信號;C(k)為第K個采樣周期中的位置反饋信號,Ye為第K個采樣周期中位置環信號的輸出,Kc為位置環比例系數。
絕對式編碼器通信程序
絕對式編碼器與DSP的接口采用CPLD作為接口芯片。CPLD的程序采用VHDL語言編寫,程序結構如圖4所示。此電路完成串行輸入數據到并行輸出數據的轉換,以及并行輸入數據到串行輸出數據的轉換。
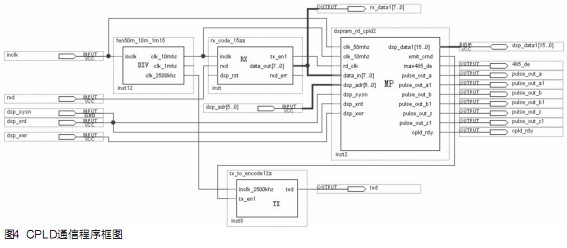
圖4中,模塊DIV為時鐘分頻器,TX模塊接收來自微處理器接口模塊MP的8位并行數據,并通過端口DOUT將數據串行輸出到RS-485端口。反過來,RX模塊接收串行數據輸入,并以8位并行格式發送至MP模塊,MP模塊同時將接收到的位置信號轉成脈沖形式輸出,實現與CNC的連接。

pid控制器相關文章:pid控制器原理










評論