基于攝像頭的賽道信息處理和控制策略實現
作者:上海交通大學電子系 胡晨暉 上海交通大學機械設計與自動化研究所 賈秀江 上海交通大學 自動化系 方興
時間:2009-06-22
來源:
收藏
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢

圖3 單行黑線位置提取效果(紅色線表示黑線中心)
中值濾波
完成單行黑線提取后,可將12行位置連接起來,得到黑線的大致趨勢。但即使前面已有一些濾除干擾的措施,仍能發現個別行的黑線位置偶爾會出現異常跳變。于是,這里采用了常用的中值濾波技術:對于中間第2到11行這10行黑線位置,用當前行和前后兩行位置的中間值作為當前行濾波后的黑線位置。中值濾波可消除單行干擾,得到的10行有效黑線位置用數組black_line[10]表示。
控制策略
得到10行黑線位置后,就可以充分利用這一信息對賽道各種情況(如圖4所示)進行判決,實現速度和轉向的優化控制:如在直道保持高速、入彎減速出彎加速;直道和S道P參數小些、普通彎道P參數大些等。下面通過給出作用在black_line數組上的算子O,介紹賽道判決的方法。
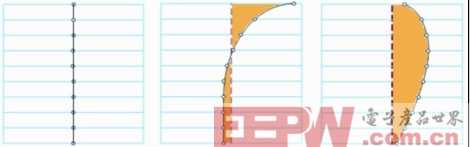
圖4 直道、普通彎和S彎的黑線位置提取結果(紅色虛線表示視野中心)










評論