基于面陣CCD的賽道參數檢測方法
——

將S12單片機采集的圖像分辨率特點,與賽道檢測對圖像分辨率的要求進行對比,可以發現,在安裝CCD攝像頭的時候,只要將它旋轉90度,輸出的圖像信息也相應旋轉90度(如圖2所示)。這樣一來,S12中的AD轉換器采集的圖像信息,水平分辨率與垂直分辨率就會互換,原來水平分辨率低、垂直分辨率高的圖像,就會變成水平分辨率高、垂直分辨率低的實際圖像,正好滿足道路參數檢測的要求。
本文引用地址:http://cqxgywz.com/article/95617.htm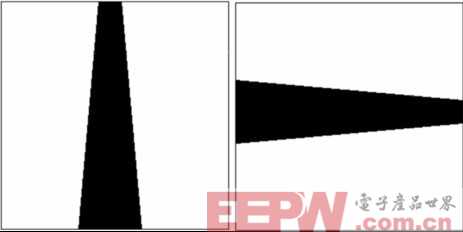
圖2 賽道圖像以及旋轉90度后的賽道圖像
此外,我們還可以通過讓S12適當超頻運行、降低AD轉換器精度等方式,提高AD轉換器的速度。
圖像存儲空間:
由于將圖像水平旋轉了90度,需要將圖像數據進行存儲,在整幅圖像的基礎上計算出路徑水平信息。S12內部有8K字節的RAM空間。如果存儲300*48分辨率圖像則不夠,但可以存儲若干幅75*24的低分辨率圖像數據。從低分辨率圖像所得到的路徑參數,其精度仍可以滿足車模控制的需要。一般情況下,只需要兩塊圖像存儲空間即可,一塊作為采集圖像的存儲空間,另外一塊作為處理緩沖區。
圖像信息處理速度:
如果采用75*24分辨率的圖像,每隔4行采集一行圖像信息,圖像采集所占用的CPU時間不會超過1/4。因此,大部分的CPU工作時間可以用于圖像處理以及運動控制。



















評論