- 機器人進化的速度越來越快。我們總關注機器人的智能與敏捷,卻常忽略一個關鍵的制約因素——散熱。對機器人來說,無論是核心處理器的算力爆發(fā),還是關節(jié)電機的高頻運作,甚至是靈巧手的精密操作,都會產生巨大熱量。而過熱會導致性能下降、壽命縮短甚至故障。因此,下一代機器人的突破,不只在算法,更在于如何為它們高效“降溫”。100Tops高算力芯片,帶來強勁性能,也帶來巨大散熱壓力。芯片結溫一旦超過閾值——死機、失靈,問題接踵而至。想要機器人不斷進化,散熱就是必須攻克的天花板!那么如何為機器人降溫呢?世強定制化機器人散熱方
- 關鍵字:
機器人算力芯片 世強 關節(jié) 激光雷達 靈巧手
- 機器人拳擊比賽上,本想重拳出擊KO對方,結果拳打出去沒有力氣;機器狗凌空翻轉,卻在半空卡住,尷尬落地。機器人打出去的拳是否有力,反應速度快不快,動作是否流暢,這一切都與關節(jié)電機密切相關。世強推出氮化鎵關節(jié)電機方案,融合24bit高精度磁編碼器、帶EtherCAT通信的MCU和氮化鎵技術,重塑機器人關節(jié)性能!01超高精度,動作絲滑如真人24bit磁編碼器,分辨率比傳統(tǒng)的16bit提升了8倍(24bit產品是實際有效位16bit+8bit的校驗位,比平常的16bit(實際有效位13bit)的精度高8倍),角度
- 關鍵字:
編碼器 EtherCAT 機器人關節(jié) 關節(jié) 氮化鎵器件 世強

- 基于ZigBee的城市照明監(jiān)控系統(tǒng)網關節(jié)點的軟硬件設計,引言路燈和景觀燈是城市夜晚一道亮麗的風景線,也是城市中必需的公用照明設施。城市照明監(jiān)控系統(tǒng)是一種監(jiān)測與控制的集成系統(tǒng)。一套高效的城市照明監(jiān)控系統(tǒng)可以節(jié)省大量的人力物力。但目前,我國城市照明監(jiān)控技術還比
- 關鍵字:
關節(jié) 軟硬件 設計 網關 監(jiān)控系統(tǒng) ZigBee 城市 照明 基于
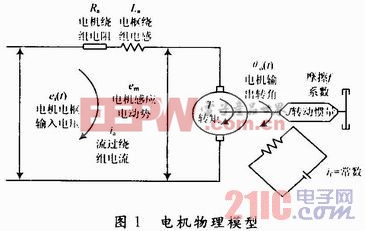
- 摘要:為了得到擬人機器人上肢關節(jié)控制電機的精確參數,通過建立直流電機的物理和數學模型,利用Matlab軟件建模和仿真,找到了一個合適的PID控制方法,通過調節(jié)KP,KI,KD參數,系統(tǒng)獲得了較高的控制精度和響應速度,
- 關鍵字:
參數 控制 關節(jié) 機器人 擬人
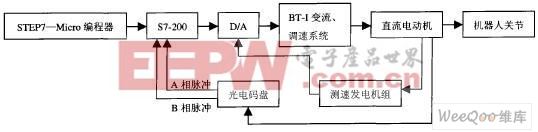
- 利用可編程控制器(PLC)控制系統(tǒng)的高可靠性、編程及維護方便、體積小的特點,將其應用于環(huán)流可逆調速系統(tǒng)中,研制出基于PLC的工業(yè)機器人關節(jié)直流伺服系統(tǒng),通過環(huán)流可逆調速系統(tǒng)控制電機的正反轉, 實現(xiàn)對工業(yè)機器人關節(jié)的伺服控制。其優(yōu)點是在改變電機正反轉時無需改變線路結構,使工業(yè)機器人關節(jié)的伺服控制更簡單、可靠和穩(wěn)定。
- 關鍵字:
直流 伺服系統(tǒng) 關節(jié) 機器人 PLC 工業(yè) 基于

- DSP實現(xiàn)仿生機器蟹多關節(jié)控制系統(tǒng),仿生機器蟹控制系統(tǒng)需要較高的控制精度和運算速度,以便在機械結構剛度較高的情況下,通過提高響應速度來確保機器人的正常行走和姿態(tài)控制。由于在機器蟹腿節(jié)和脛節(jié)置有兩個電機(如圖1所示),使其質量較大,同時由
- 關鍵字:
關節(jié) 控制系統(tǒng) 機器 仿生 實現(xiàn) DSP
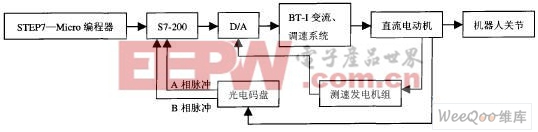
- 摘要:利用可編程控制器(PLC)控制系統(tǒng)的高可靠性、編程及維護方便、體積小的特點,將其應用于環(huán)流可逆調速系統(tǒng)中,研制出基于PLC的工業(yè)機器人關節(jié)直流伺服系統(tǒng),通過環(huán)流可逆調速系統(tǒng)控制電機的正反轉, 實現(xiàn)對工業(yè)
- 關鍵字:
直流 伺服系統(tǒng) 關節(jié) 機器人 工業(yè) PLC
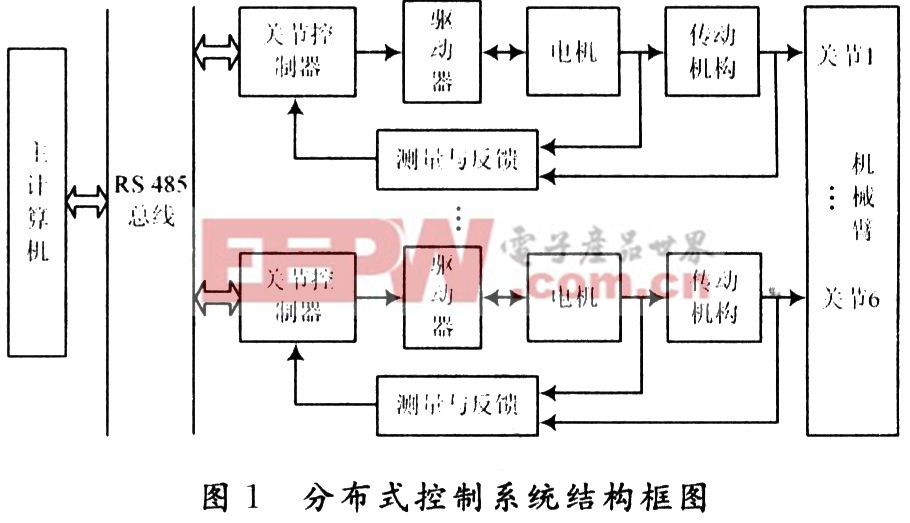
- 在具有32自由度仿人機器人中,為了每一個關節(jié)動作準確,可以采用分布式控制的體系結構。這里采用基于RS 485總線的TMS320F240DSP作為分布式關節(jié)控制器,非常適合于在機械臂內的狹小空間內安裝,并進行增量碼盤和速度檢測電路的設計以及相應的軟件設計等,完成了6個自由度機械臂分布式關節(jié)控制器設計,能夠滿足仿人機器人技術與系統(tǒng)的運動軌跡的要求。
- 關鍵字:
控制器 設計 關節(jié) 機器人 DSP 基于
關節(jié)介紹
您好,目前還沒有人創(chuàng)建詞條關節(jié)!
歡迎您創(chuàng)建該詞條,闡述對關節(jié)的理解,并與今后在此搜索關節(jié)的朋友們分享。
創(chuàng)建詞條
關于我們 -
廣告服務 -
企業(yè)會員服務 -
網站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473