目前,日本最新研制一款名 為“諾比(Noby)”的兒童機器人,這一名 稱是“9月大小嬰兒”的縮寫。該機器人全身分 布著具有觸覺能力的600個傳感器、攝像頭和 擴音器,它們裝配在機器人頭部實現視力和聽力,這些裝置與一臺功能強大的計算機相連。這款機器人有助于揭示人類嬰兒階段的發育特征。
日本最新研制一款9個月嬰兒機 器人——“諾比”,有助更好理解人類發育成長
諾比機器人身高71厘米(28英寸)、
關鍵字:
機器人 傳感器
經過50多年的發展,人工智能已形成極廣泛的研究領域,并且取得了許多令人矚目的成就[1]。人工智能也稱機器智能,是一門研究人類智能機理和如何用計算機模擬人類智能活動的學科。智能機器人技術綜合了計算機、控制論、
關鍵字:
電路設計 實現 硬件 機器人 滅火 智能
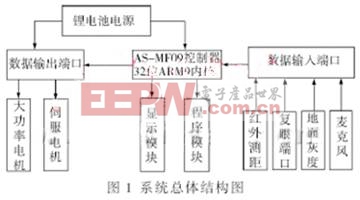
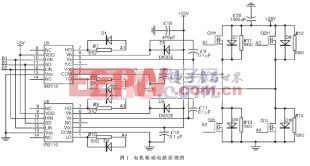
摘 要: 以Philips公司的ARM單片機LPC2119為控制核心,提出了一種自主式移動機器人的設計方案。應用98C1051構成多超聲傳感器子系統控制電路,由此子系統實現對障礙物的測距及機器人的自主避障行走控制;通過光敏傳感
關鍵字:
機器人 設計 移動 自主 LPC2119 基于
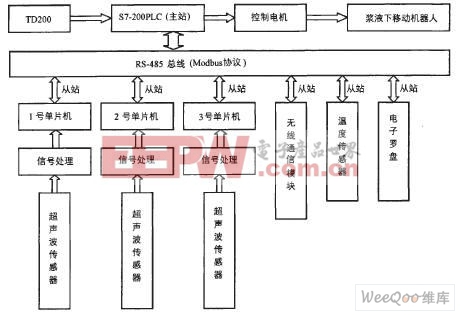
摘要:結合漿液下移動機器人系統的功能要求及PLC的特點,構建了槳液下移動機器人的控制系統。為提高該機器人系統的經濟效益和實用性,簡化機器人控制系統,以西門子PLC為主控制器構成整個機器人的控制網絡。對網絡
關鍵字:
控制系統 機器人 移動 漿液 PLC
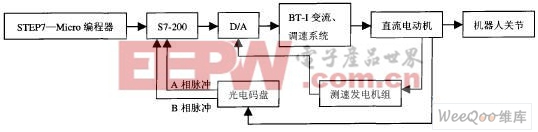
摘要:利用可編程控制器(PLC)控制系統的高可靠性、編程及維護方便、體積小的特點,將其應用于環流可逆調速系統中,研制出基于PLC的工業機器人關節直流伺服系統,通過環流可逆調速系統控制電機的正反轉, 實現對工業
關鍵字:
直流 伺服系統 關節 機器人 工業 PLC
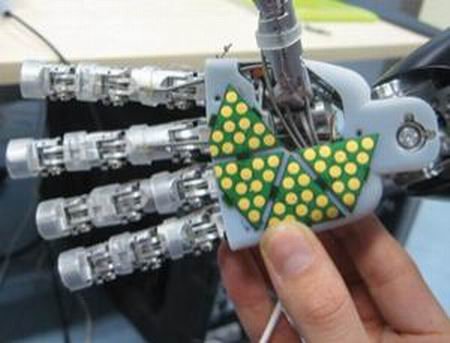
據英國《新科學家雜志》 報道,機器人裝配皮膚不僅可以使它們更具審美感,同時也更讓社會公眾所接納。觸摸感應式皮膚還可以 避免機器人出現意外傷害。目前,意大利科學家最新研制一種機器人皮膚,可靈敏地感應到1克重物體的壓力。這種最新機器人皮膚是由三角狀柔性印刷電路板構成,它的作用相當于傳感器,能夠覆蓋在iCub機器人表面。每個三角狀柔性印刷電路板的邊長 各3厘米,并包含12個電容銅觸點。
iCub今年5月份,意大利科技協會一支研究小組將在iCub機器人上首次裝配觸摸式皮膚,據悉,這種新型 機器人皮膚
關鍵字:
機器人 傳感器
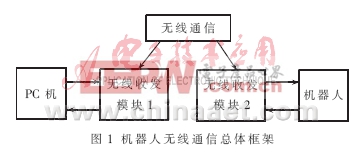
由于移動機器人左右兩輪的非線性特征,其反饋調節無法克服這一特性,必須借助PC機來進行調節。為此提出了一種無線實時反饋控制方法,在PC機上加入PID控制算法,實現了對機器人的無線實時反饋控制。
關鍵字:
控制系統 設計 反饋 實時 機器人 無線 移動 通信協議
最近在看一部很有意思的科幻影集–Caprica,它是知名影集Battlestart Galactica的前傳,描述的是人類與機器人的戰爭故事。Caprica這部前傳,則是回過頭來說機器人自主性智能的由來,而這個蘊孕機器人智能的Caprica星球,很顯然地即是地球未來生活的寫照
關鍵字:
機器人 3DTV
目錄1.使用LEGOMINDSTORMSNXT進行原型開發2.使用iRobotCreate進行原型開發3.使用NISingle-BoardR...
關鍵字:
NI LabVIEW 原型開發 機器人
記者從廣東省工業機器人高峰論壇上獲悉,隨著改革開放30年,廣東GDP上升、勞動力最低工資上升、高素質勞動力緊缺等因素,我國必須使用機器人來提高制造業產業附加值、提高產品品質和保證質量統一。工業機器人及數字化裝備發展面臨著前所未有的好時機。
機器人是先進制造技術和自動化裝備的典型代表,是人造機器的“終極”形式。機器人已經成為衡量一個國家制造水平和科技水平的重要標志。據聯合國歐洲經濟委員會報告,2008年全球工業機器人裝機總量已經超過100萬套。其中亞洲增長最快。預計到201
關鍵字:
機器人 自動化
使用iPAM系統的病人接受上肢治療運動挑戰:開發一種安全且可靠的機器人康復系統,對中風后手臂殘障...
關鍵字:
LabVIEW 機器人 康復系統
使用NI LabVIEW軟件最大的好處是可以設計且自定義圖形化用戶界面.
作者:
Cristiano Buttinoni, Certified LabVIEW Developer (CLD) - ImagingLab
行業:
Manufacturing, 電子
產品:
LabVIEW, 機器視覺附件
挑戰:
用短批次和多樣化的產品為裝配電子元件設計一個緊密集成有機器人技術和視覺技術的系統
解決方案:
在NI視覺系統的指導下,用
關鍵字:
NI LabVIEW 機器人
使用iPAM系統的病人接受上肢治療運動
作者:
Andrew Jackson - University of Leeds
Peter Culmer - University of Leeds
Martin Levesley - University of Leeds
Sophie Makower - Leeds Primary Care NHS Trust
Bipinchandra Bhakta - Leeds Institute of Molecular Medi
關鍵字:
NI LabVIEW 機器人
概覽
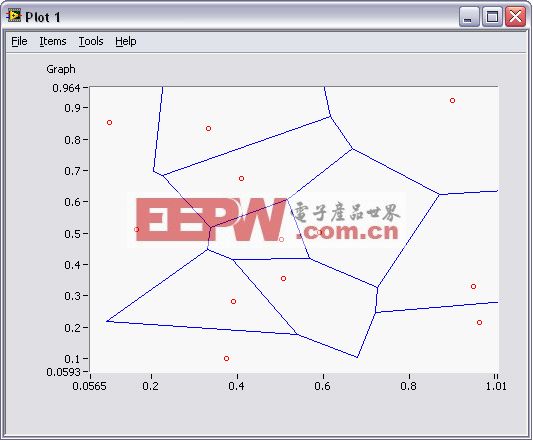
自主移動機器人的規劃與導航包括利用有目的的抉擇制定和執行來使系統實現最高級的目標。機器人是否勝任導航的能力必須通過兩個技能來證明:路徑規劃和避障。
目錄
1. 路徑規劃
2. 避障
3. 在中LabVIEW使用算法
路徑規劃
給定地圖和目的地情況下的路徑規劃指的是機器人通過軌跡識別行進至目的地的能力。路徑規劃是至關重要的問題解決能力,因為機器人必須有能力決定在到達目的地前的路程中如何行進。
路徑規劃可分為兩部分:表達與算法。路徑規劃人員首先將機器人
關鍵字:
NI LabVIEW 機器人
概覽本教程對LabVIEW機器人模塊軟件自帶的機器人算法進行介紹。從傳感器直至路徑規劃,您都可以使用這個產品來設計新一代的復雜的自動化系統。LabVIEW機器人模塊帶有全新的功能完備的“機器人”選板,其中包含了設
關鍵字:
LabVIEW API 機器人模塊 機器人
機器人 介紹
機器人目錄
機器人概述篇
機器人的組成
機器人發展史
機器人分類篇
機器人品種篇
人類與機器人
電影——《我,機器人》
北京奧運會曾經使用過的機器人
機器人學國家重點實驗室
機器人
日本最新機器人
美國戰斗機械狗研制成功 網上引發轟動
搜索引擎術語
艾西莫夫機器人三定律 機器人概述篇
機器人的組成
機器人發展史
機器人分類篇
機器人品種篇
人類與機器人
電影 [
查看詳細 ]
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473