linux 驅(qū)動 文章 最新資訊
基于DSP/BIoS設(shè)備驅(qū)動模型的視頻驅(qū)動程序開發(fā)
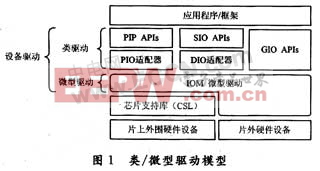
- 基于DSP/BIoS設(shè)備驅(qū)動模型的視頻驅(qū)動程序開發(fā),通過給外部設(shè)備編寫驅(qū)動程序是一種有效的控制外設(shè)的方法。隨著DSP的應(yīng)用越來越廣泛,DSP實時系統(tǒng)的日趨復(fù)雜及新技術(shù)的出現(xiàn),DSP處理器所連接的外部設(shè)備也是種類繁多,各不相同,而每一個外設(shè)都需要一個特定的驅(qū)動程序
- 關(guān)鍵字: 視頻 驅(qū)動 程序開發(fā) 模型 設(shè)備驅(qū)動 DSP BIoS 基于 DSP BIoS 設(shè)備驅(qū)動模型 視頻驅(qū)動程序開發(fā) TMS320DM642
基于DSP的欠驅(qū)動體操機器人的搖起控制設(shè)計
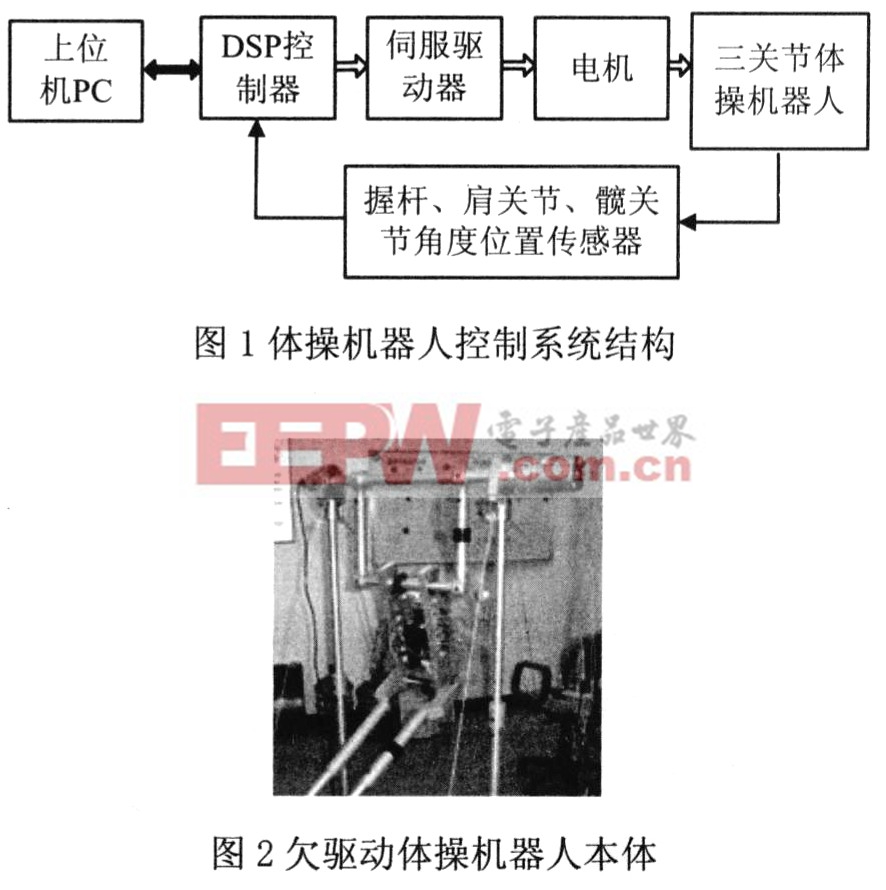
- 針對欠驅(qū)動機器人控制系統(tǒng),給出一種基于DSP控制的類人形的三關(guān)節(jié)欠驅(qū)動體操機器人。首先以ADSP218l為核心設(shè)計出控制器,通過高速PCI總線與上位機PC通訊,采用直流電機伺服控制。然后依據(jù)建立的體操機器人動力學(xué)模型提出基于能量增加的正弦和斜坡函數(shù)輸入方式,經(jīng)對體操機器人作搖起控制實驗,實驗顯示,設(shè)計的三關(guān)節(jié)欠驅(qū)動體操機器人控制系統(tǒng)滿足實時性、穩(wěn)定性和準(zhǔn)確性要求。
- 關(guān)鍵字: 控制 設(shè)計 機器人 體操 DSP 驅(qū)動 基于 驅(qū)動器


linux 驅(qū)動介紹
您好,目前還沒有人創(chuàng)建詞條linux 驅(qū)動!
歡迎您創(chuàng)建該詞條,闡述對linux 驅(qū)動的理解,并與今后在此搜索linux 驅(qū)動的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對linux 驅(qū)動的理解,并與今后在此搜索linux 驅(qū)動的朋友們分享。 創(chuàng)建詞條
linux 驅(qū)動電路




linux 驅(qū)動相關(guān)帖子
linux 驅(qū)動資料下載
linux 驅(qū)動專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司