mcu 飛思卡爾 動力傳動 文章 最新資訊




基于攝像頭的預測控制策略
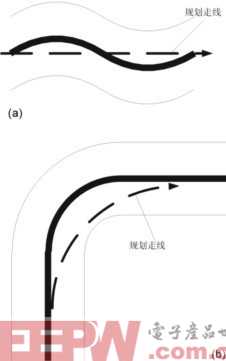
- 要實現(xiàn)一個完整的基于攝像頭的智能小車,第一步要做的就是將攝像頭輸出的模擬信號通過單片機AD轉換采集到單片機中,然后對采集到的原始的圖像數(shù)據(jù)進行處理,以獲取賽道中央的黑線在圖像坐標系中的位置。 接著,就要利用處理得到的圖象信息對智能小車進行控制。就目前而言,各參賽隊用的最多的橫向控制(轉向控制)就是PID控制。采用PID控制方式,無需對攝像頭作嚴格的標定,因為只須將黑線在圖像坐標系中的位置偏差乘相應的PID系數(shù),就可以作為轉向的控制律,至于PID系數(shù)取多少,則可以通過簡單的實驗調(diào)試而獲得合適的取值
- 關鍵字: 飛思卡爾 智能車 傳感技術 攝像頭
智能車運動狀態(tài)實時監(jiān)測系統(tǒng)的設計及實現(xiàn)
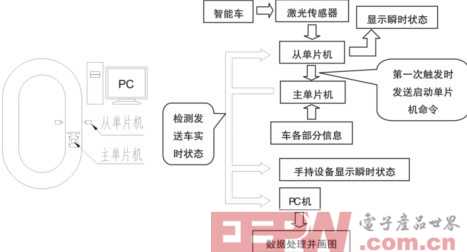
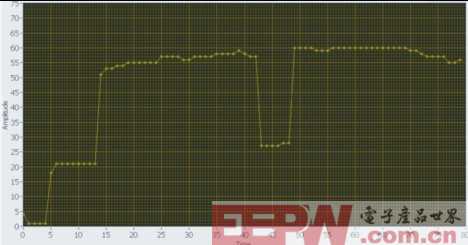
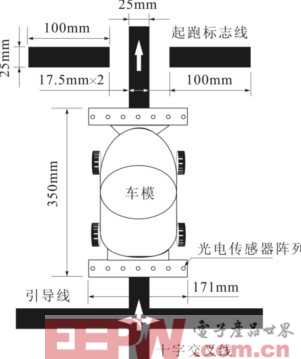
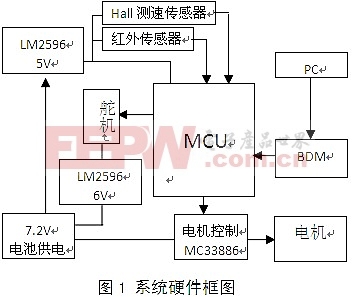
- 系統(tǒng)功能及應用 本系統(tǒng)主要完成將智能車行駛過程中的各種狀態(tài)信息(如傳感器亮滅,車速,舵機轉角,電池電量等)實時地以無線串行通信方式發(fā)送至上位機處理,并繪制各部分狀態(tài)值關于時間的曲線。有了這些曲線就不難看出智能車在賽道各個位置的狀態(tài),各種控制參數(shù)的優(yōu)劣便一目了然了。尤為重要的是對于電機控制PID參數(shù)的選取,通過速度—時間曲線可以很容易發(fā)現(xiàn)各套PID參數(shù)之間的差異。對于采用CCD傳感器的隊伍來說,該系統(tǒng)便成為了調(diào)試者的眼睛,可以見智能車之所見,相信對編寫循線算法有很大幫助。而且還可以對這
- 關鍵字: 飛思卡爾 智能車 傳感技術 車載數(shù)據(jù)采集系統(tǒng) 無線數(shù)傳系統(tǒng) 上位機數(shù)據(jù)處理系統(tǒng)
基于攝像頭的賽道信息處理和控制策略實現(xiàn)
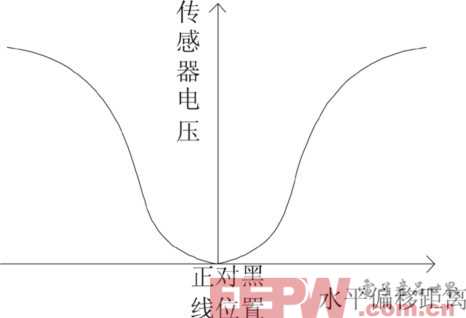
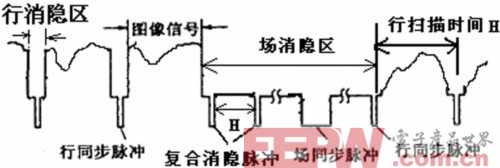
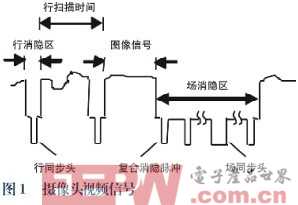
- 在去年的Freescale全國大學生智能車大賽中,賽道信息檢測方案總體上有兩大類:光電傳感器方案和攝像頭方案。前者電路設計簡單、信息檢測頻率高,但檢測范圍、精度有限且能耗較大;后者獲取的賽道信息豐富,但電路設計和軟件處理較復雜,且信息更新速度較慢。在比較了兩種方案的特點并實際測試后,我們選擇了攝像頭方案。本文將在獲得攝像頭采集數(shù)據(jù)的前提下,討論如何對數(shù)據(jù)進行處理和控制策略的實現(xiàn)。 數(shù)據(jù)采集 我們選擇了一款1/3?OmniVision?CMOS攝像頭,用LM1881進行信號分離,結合AD采樣
- 關鍵字: 飛思卡爾 智能車 傳感技術 CMOS 攝像頭


mcu 飛思卡爾 動力傳動介紹
您好,目前還沒有人創(chuàng)建詞條mcu 飛思卡爾 動力傳動!
歡迎您創(chuàng)建該詞條,闡述對mcu 飛思卡爾 動力傳動的理解,并與今后在此搜索mcu 飛思卡爾 動力傳動的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對mcu 飛思卡爾 動力傳動的理解,并與今后在此搜索mcu 飛思卡爾 動力傳動的朋友們分享。 創(chuàng)建詞條
mcu 飛思卡爾 動力傳動電路



mcu 飛思卡爾 動力傳動相關帖子
mcu 飛思卡爾 動力傳動資料下載
mcu 飛思卡爾 動力傳動專欄文章
關于我們 -
廣告服務 -
企業(yè)會員服務 -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司