手把手基于 MINI 數據集帶你做一次板端精度評估

# 1.引論:寫在前面的
性能評估和精度評估在模型開發和部署過程中是至關重要的兩個部分。對于精度評估,地平線算法工具鏈提供了兩中路徑進行算法的精度評估。一條為服務器端精度評估,該路徑通過 PYTHON 腳本使用 PYTHON 推理接口進行板端推理仿真,運行。BC 或 quantized.onnx 量化量化模型以獲取推理結果并進行后處理后與真值進行對比,最終計算出量化模型的精度;另一條另則是直接在板端推理量化后的 hbm 模型,獲取推理結果,然后下載推理結果到服務器端并通過 PYTHON 評估腳本結合真值進行進行計算,最終計算出量化模型的精度。因為后者是在板端進行推理,可以充分利用硬件加速過程,在速度上相比服務器仿真要高效很多,不過,限于板端存儲限制,評測所需要的大數據集還需要通過 NFS 在板端使用。
本文以 bevformer 精度評估為例,引到讀者從評測環境構建到評測數據準備,最后到精度評測試試和最終結果計算的整個流程,以期給您一個進行板端精度評測的一個流程全貌。
# 2.環境準備和評測實施
整個評測過程涉及 評測所用的數據集文件準備、NFS 服務端安裝和板端目錄掛載、評測程序準備和相關文件配置、評測執行和結果收集 以及 評測結果計算 等 5 個小環節。其中評測所用的數據集文件準備、NFS 服務端安裝、評測結果結算是在服務器端進行,而板端目錄掛載、評測程序準備和相關文件配置、評測執行和結果收集為板端執行部分。下面為針對這寫過程逐步為大家展開說明。因為測評過程是基于算法工具鏈進行的,所以在開始測評之前需要大家先配置好工具鏈的 docker 環境并關在 OE 示例包。我這里以征程 6 的 OE-3.0.22 為例進行說明,另外為了加速測試過程,這里僅以 mini 數據集加以闡述。
## 2.1 評測所用的數據集文件準備
1.下載的 nuScenes 的 v1.0-mini.tgz、nuScenes-lidarseg-all-v1.0.tar.bz2、nuScenes-map-expansion-v1.3.zip 和 can_bus.zip 后進行解壓,解壓后的目錄如下所示:
```Plain
|--nuscenes
|-- can_bus #can_bus.zip解壓后的目錄
|-- lidarseg #nuScenes-lidarseg-all-v1.0.tar.bz2解壓后的目錄
|-- maps #nuScenes-map-expansion-v1.3.zip解壓后的數據
|-- samples #v1.0-mini.tar解壓后的目錄
| |-- CAM_BACK
| |-- ...
| |-- CAM_FRONT_RIGHT
| |-- ...
| `-- RADAR_FRONT_RIGHT
|-- sweeps #v1.0-mini.tar解壓后的目錄
| |-- CAM_BACK
| |-- ...
| |-- CAM_FRONT_RIGHT
| |-- ...
| `-- RADAR_FRONT_RIGHT
|-- v1.0-mini #v1.0-mini.tgz解壓后的目錄
|-- attribute.json
|
`-- visibility.json
```
2.在 nuscenes 下創建 meta 文件夾,將解壓后的 v1.0-mini 文件夾、maps 文件夾、lidarseg 文件夾拷貝到 meta 文件夾內,構建如下:
```Plain
meta/
├── lidarseg
│ └── v1.0-mini
├── maps
│ ├── 36092f0b03a857c6a3403e25b4b7aab3.png
│ ├── 37819e65e09e5547b8a3ceaefba56bb2.png
│ ├── 53992ee3023e5494b90c316c183be829.png
│ ├── 93406b464a165eaba6d9de76ca09f5da.png
│ ├── basemap
│ ├── expansion
│ └── prediction
└── v1.0-mini
├── attribute.json
├── calibrated_sensor.json
├── category.json
├── ego_pose.json
├── instance.json
├── log.json
├── map.json
├── sample.json
├── sample_annotation.json
├── sample_data.json
├── scene.json
├── sensor.json
└── visibility.json
```
3.進入工具鏈的/samples/ucp_tutorial/dnn/ai_benchmark/j6/qat/tools/eval_preprocess/目錄修改 bev_preprocess.py、
4.修改 bev_preprocess.py 后執行下列命令: python3 bev_preprocess.py --model=bevformer_tiny_resnet50_detection_nuscenes --data-path=/data_set/nuScenes_mini --meta-path=/data_set/nuScenes_mini/meta --reference-path=…/…/script/config/reference_points --save-path=。/nuscenes_bev_mini
> 注:/data_set/nuScenes_mini 為上述準備的數據集的目錄
1. 上述命令執行后生成 nuscenes_bev_mini 目錄(其中包含 gt 信息 val_gt_infos.pkl)和 idx.txt,他們作為精度評測過程依賴文件,在 NFS server 構建之后可以拷貝到 NFS 分享目錄中,將來在板端掛載后使用。
## 2.2 NFS 服務器安裝、配置 以及 板端掛載使用
### 2.2.1 NFS 服務器安裝和配置( *此處為 ubuntu2204 系統* )
1.安裝和啟動
```
# 安裝nfs-server(安裝后會自動啟動)
sudo apt install nfs-kernel-server
# 查看nfs-server狀態
sudo systemctl status nfs-server
# 開機自啟
sudo systemctl enable nfs-server
```
2.創建共享目錄
```
sudo mkdir -p /mnt/nfs_share
#修改權限
sudo chmod -R 777 /mnt/nfs_share
# !!!準備好的精度評測過程依賴文件可以拷貝到新建的目錄中,板端掛載后即可使用
```
3.使用命令 sudo vi /etc/exports 編輯配置文件,末尾添加如下內容: `/mnt/nfs_share *(rw,sync,no_subtree_check,insecure,no_root_squash)`
4.使用命令`sudo systemctl restart nfs-server`重啟 NFS 服務
### 2.2.2 NFS 板端掛載和可用性驗證
```
#安裝依賴包(默認Jx開發板系統已安裝,此處僅為在其他板端或服務器掛載NFS做參考)
#sudo apt install nfs-common
#創建掛載目錄
mkdir -p /userdata/nfs
#掛載NFS共享目錄(這里假設服務器IP為:192.168.1.6)
sudo mount -t nfs 192.168.1.6:/mnt/nfs_share /userdata/nfs
```
## 2.3 評測程序準備和相關文件配置
1. 精度評測工具準備 該文章精度評測使用工具鏈自帶的 ai_benchmarch 進行內容展開和測試實施,因此實在測評開始前需要先編譯好 ai_benchmarch 的上板程序,并將編譯結果打包后上傳到用于實施精度評測的開發板上(一般來講/map 目錄空間較大,這里以將 ai_benchmarch 部署包上傳至/map/tester 下,解壓后為/map/tester/ai_benchmark)
2. 精度測試流程啟動腳本 為/map/tester/ai_benchmark/qat/script/bev/bevformer_tiny_resnet50_detection_nuscenes/accuracy.sh,其配置文件為同級目錄下的 workflow_accuracy.json,從配置還可以看出其使用的數據位于…/…/…/data/nuscenes_bev/(絕對路徑為/map/tester/ai_benchmark/qat/data/nuscenes_bev)中。
3. 評測數據準備 /map/tester/ai_benchmark/qat/script/bev/bevformer_tiny_resnet50_detection_nuscenes/gen_file_list.sh 用于生成 workflow_accuracy.json 中所使用的*。lst 文件,為了適配 mini 數據集需要修改腳本如下(order_file 指向回灌數據生成過程中的 idx.txt):

腳本修改后運行便可在/map/tester/ai_benchmark/qat/data/nuscenes_bev 目錄生成 mini 數據集對應的 lst 文件。
> - /userdata/nfs 為 NFS 掛載目錄,其中存放有評測所需要的文件。
> - 為了使得測試順利進行,測試數據可以使用`"ln -s /userdata/nfs/nuscenes_bev_mini/* ."`加以引用(實際應用過程很多使用也是通過軟鏈方式加以使用)
## 2.4 評測執行和結果收集
數據準備好之后就可以運行 accuracy.sh 進行測評實施,測試完成后生成 eval.log,用于后面的最終結果評估。
## 2.5 評測結果計算
1. 精度計算在服務器端的 OE 開發環境中進行,執行腳本為/open_explorer/samples/ucp_tutorial/dnn/ai_benchmark/j6/qat/tools/python_tools/accuracy_tools/bev_eval.py。
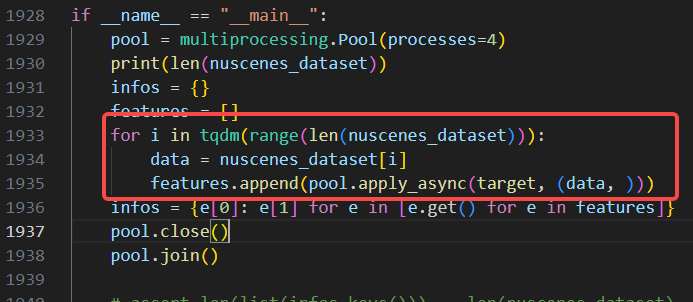
2. 為了使用 mini 數據集,需要對腳本稍加修改如下:
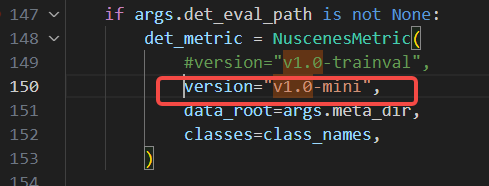
3.將板端運行 accuracy.sh 后生成的 eval.log 傳回服務器端 OE 開發環境中聯合數據集的 meta(前面準備評測數據集時已備),以及準備評測數據集過程中生成的 val_gt_infos.pkl 執行下面的精度評估命令的到評估結果。
```
cd /open_explorer/samples/ucp_tutorial/dnn/ai_benchmark/j6/qat/tools/python_tools/accuracy_tools
#eval.log、val_gt_infos.pkl和meta的位置根據自身情況調整。
python3 bev_eval.py --det_eval_path=eval.log --gt_files_path=../../eval_preprocess/nuscenes_bev_mini/val_gt_infos.pkl --meta_dir=/data_set/nuScenes_mini/meta
eval.py --det_eval_path=eval.log --gt_files_path=../../eval_preprocess/nuscenes_bev_mini/val_gt_infos.pkl --meta_dir=/data_set/nuScenes_mini/meta
```
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。








