專欄中心
EEPW首頁(yè) > 專欄 > 征程 6X Camera 接入數(shù)據(jù)評(píng)估征程 6X Camera 接入數(shù)據(jù)評(píng)估
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
Camera 接入時(shí),需評(píng)估鏈路上各模塊之間的理論要求和限制,接入通路一般涉及加解串器,MIPI,CIM, ISP(RAW),PYM,GDC/STITCH(可選)等 ,接入模組一般分為 RAW/YUV Sensor,RAW Sensor 一般在通路上需要 ISP 處理進(jìn)行處理,對(duì)處理性能有要求的需同時(shí)考慮通路中相關(guān)模塊性能以及限制,對(duì)于數(shù)據(jù)接入來(lái)說(shuō)前端解串器,MIPI, CIM 的影響更明顯。
在 DES 側(cè): 其輸出 MIPI 速率需滿足總帶寬需求,同時(shí)還要滿足 Camera 輸出 timing,6E/M 上主流的美信解串器最大速率為 2.5G,其他廠商或者大速率需額外適配。
在 MIPI 側(cè),需滿足 ipi 總帶寬大于 mipiclk 輸入數(shù)據(jù)帶寬,否則可能出現(xiàn) ipi overflow。
其 FIFO 較小,對(duì)于有數(shù)據(jù)累積情況:行長(zhǎng)越大,累積時(shí)間越長(zhǎng),越容易出現(xiàn)。
若滿足 IPI 速率大于 mipiclk 輸入速率,則理論上不會(huì)產(chǎn)生 ipi overflow。
其他的硬件模塊的限制可以參考模塊規(guī)格,此處跳轉(zhuǎn)到對(duì)應(yīng)的規(guī)格限制。
帶寬計(jì)算,此處均按 RAW16 計(jì)算,其他的 RAW 尺寸則按照對(duì)應(yīng)的比例換算即可:
Camera 接入實(shí)際數(shù)據(jù)量:
1 路 8M RAW16: 3840x216028*30 ~= 4Gbps
1 路 2M YUV: 1920x10801630 ~= 1Gbps
MIPI IPI 傳輸 RAW 與 YUV 的區(qū)別:默認(rèn) IPI 使用 48bit 模式:
傳 YUV 時(shí)一個(gè) ipi clock 只能傳 1 個(gè) pixel
傳 RAW(<=16)時(shí)一個(gè) ipi clock 可傳 3 個(gè) pixel
CIM 的 IPI 速率(pix_clk)為 600M 頻率上限,因此限制了 IPI 傳輸 YUV 帶寬為 9.6Gbps,RAW 傳輸?shù)?28.8Gbps;
征程 6E/M 通用的解串器最大的支持速率是 2.5G,下圖按照此規(guī)格進(jìn)行理論計(jì)算,如有更改規(guī)定的解串器,則可進(jìn)行類比計(jì)算
CPHY: 2.28bits/symbol,因此 CPHY 計(jì)算時(shí),需要乘以對(duì)應(yīng)的系數(shù)
同一個(gè) RX 上,混合接入時(shí),由于有 YUV 數(shù)據(jù),最大 IPI 的傳輸限制就變成了 9.6Gbps 數(shù)據(jù)類型 IPI 帶寬限制 RAW 28.8Gbps (按 RAW16) YUV (RAW+YUV) 9.6Gbps (按 YUV422) PHY 類型 PHY 帶寬限制 CPHY 17.1Gbps DPHY 10Gbps
上述已對(duì)實(shí)際數(shù)據(jù)流以及理論接入能力進(jìn)行分析講解,下面開(kāi)始進(jìn)行實(shí)際場(chǎng)景計(jì)算
2.2實(shí)際 Camera 接入時(shí),計(jì)算 Camera 數(shù)據(jù)流不能按照理論值,此時(shí)需要考慮 blanking 時(shí)間, 因此實(shí)際接入的數(shù)據(jù)流計(jì)算如下:
數(shù)據(jù)量 = Lanes * H_total * V_total * fps * dataType(bpp, for RAW12, bpp=12; for yuv422, bpp=16)
其中 H_total、V_total 是包含了 blanking 時(shí)間的,可按照總體 0.4 的 blanking 或是長(zhǎng)和寬各 0.2 的 blanking 來(lái)計(jì)算
1 路 8M,RAW 按照總體 0.4 的 blanking 計(jì)算,YUV 的 blanking 時(shí)間按照 1.2 計(jì)算
RAW12: 3840x21601230*1.4 ~= 4.2Gbps
YUV(按 YUV422): 3840216016301.2 ~= 4.7 Gbps
MIPI RX Camera 最大接入評(píng)估:
一個(gè) 8M 的 YUV Sensor,可以再接入一路 8M 的 RAW Sensor,至于還能不能接一路 2M 的 raw Sensor 依賴于 blanking 時(shí)間,待自行評(píng)估計(jì)算
2 路 8M YUV,blanking 控制在 1.2 以內(nèi),是可以接入的,再多的模組就接入不進(jìn)來(lái)了
4 路 8M 基本是接近極限帶寬,考慮到一些硬件軟件的延時(shí),目前是接不進(jìn)來(lái)的,因此最大單 RX 最大接入能力在 3 個(gè) 8M,還可以接一個(gè)后置 2M 或者 3M,若還需更大分辨率,可能需要調(diào)試 Sensor 輸出 timing 進(jìn)行適配。
RAW Camera:
YUV Camera:
RAW+YUV
征程 6E/M 系統(tǒng),總共 3 個(gè) RX,每個(gè) RX 有 4 個(gè) ipi,理論可支持 12 路 Camera 接入,支持 CPHY 和 DPHY,不同形態(tài)的 PHY 的帶寬限制分別如下:C-PHY 17.1 Gbps,D-PHY10 Gbps。
3.2單個(gè) RX 的接入規(guī)格如下,以 RAW12 來(lái)計(jì)算的:
RAW 攝像頭接入: 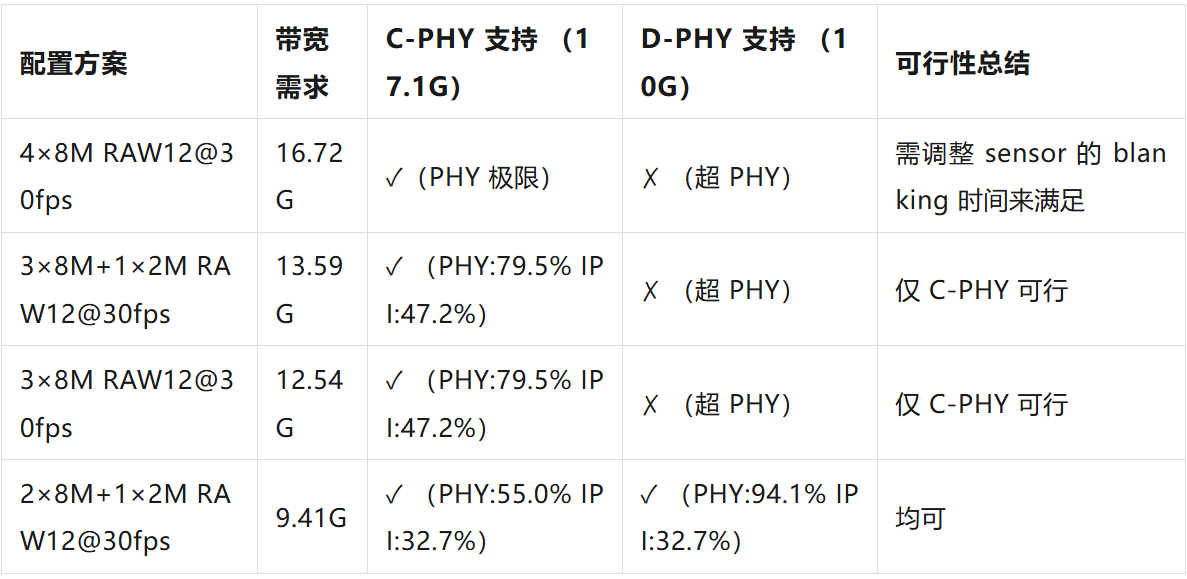
YUV 攝像頭接入: 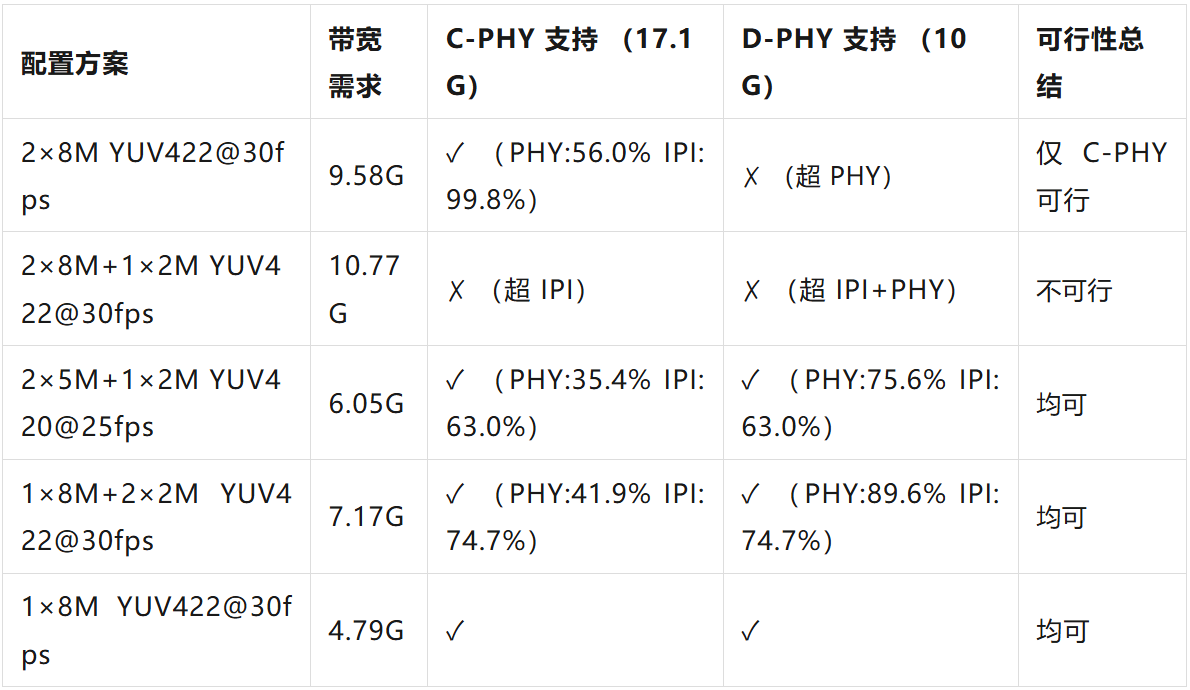
混合接入(RAW+YUV): 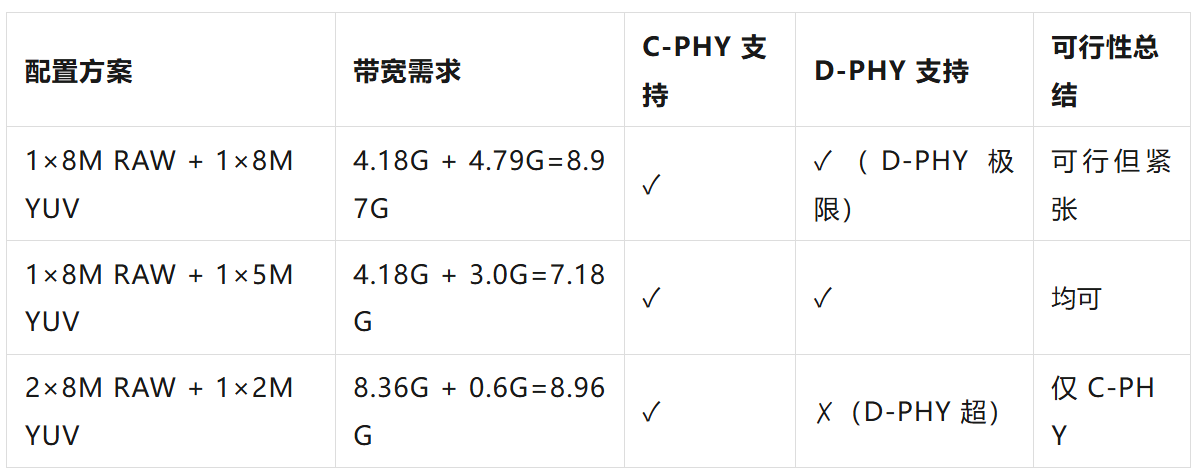
此外征程 6E/M 的 Camera 通路還支持 RAW8, RAW10,RAW16 以及 RAW20,可根據(jù)上述方法計(jì)算出相應(yīng)的接入組合方案。
*博客內(nèi)容為網(wǎng)友個(gè)人發(fā)布,僅代表博主個(gè)人觀點(diǎn),如有侵權(quán)請(qǐng)聯(lián)系工作人員刪除。
技術(shù)專區(qū)
- FPGA
- DSP
- MCU
- 示波器
- 步進(jìn)電機(jī)
- Zigbee
- LabVIEW
- Arduino
- RFID
- NFC
- STM32
- Protel
- GPS
- MSP430
- Multisim
- 濾波器
- CAN總線
- 開(kāi)關(guān)電源
- 單片機(jī)
- PCB
- USB
- ARM
- CPLD
- 連接器
- MEMS
- CMOS
- MIPS
- EMC
- EDA
- ROM
- 陀螺儀
- VHDL
- 比較器
- Verilog
- 穩(wěn)壓電源
- RAM
- AVR
- 傳感器
- 可控硅
- IGBT
- 嵌入式開(kāi)發(fā)
- 逆變器
- Quartus
- RS-232
- Cyclone
- 電位器
- 電機(jī)控制
- 藍(lán)牙
- PLC
- PWM
- 汽車電子
- 轉(zhuǎn)換器
- 電源管理
- 信號(hào)放大器
相關(guān)推薦
自動(dòng)駕駛的時(shí)代,呼喚線控底盤
求FSK信號(hào)的解調(diào)算法,主要是鐵路上的移頻信號(hào)!
攜手ADI贏得未來(lái)
物理人工智能如何在自動(dòng)駕駛和電動(dòng)汽車中應(yīng)用?
采埃孚與SiliconAuto推出自動(dòng)駕駛實(shí)時(shí)I/O接口芯片
有關(guān)指紋算法
賦能自動(dòng)駕駛和機(jī)器人感知,讀懂二維可尋址VCSEL | 硬科技有點(diǎn)意思
采用Mean-Shift和Camshift算法相結(jié)合的火焰視頻圖像跟蹤設(shè)計(jì)
數(shù)字PID控制及其改進(jìn)算法的應(yīng)用
計(jì)算機(jī)科學(xué)與技術(shù)反思錄(2)
ADI:傳感技術(shù)助力未來(lái)自動(dòng)駕駛的發(fā)展
ZF與SiliconAuto推出用于自動(dòng)駕駛的實(shí)時(shí)I/O芯片
日產(chǎn)聯(lián)手優(yōu)步與 Wayve,計(jì)劃在東京推出自動(dòng)駕駛出租車服務(wù)
數(shù)字PID控制算法之一
CRC算法原理及C語(yǔ)言實(shí)現(xiàn)
為什么可擴(kuò)展高性能 SoC 是自動(dòng)駕駛汽車的未來(lái)
簡(jiǎn)單實(shí)用的單片機(jī)CRC 快速算法
PID算法
vxwokrs下靜態(tài)圖像壓縮算法(上)
基于LPC2138的血壓測(cè)量算法開(kāi)發(fā)平臺(tái)電路圖
地平線HSD引領(lǐng)智能駕駛普惠新時(shí)代
76-81GHz自動(dòng)駕駛CMOS RADAR
英偉達(dá)宣布與比亞迪、吉利展開(kāi)自動(dòng)駕駛業(yè)務(wù)合作
[轉(zhuǎn)帖]us/os就緒表的維護(hù)算法分析
目標(biāo)跟蹤算法在紅外熱成像跟蹤技術(shù)上的應(yīng)用
加快實(shí)現(xiàn)自動(dòng)駕駛(完整小組討論)
自動(dòng)駕駛的現(xiàn)狀與未來(lái)(節(jié)選)
英偉達(dá) “全天候” 芯片實(shí)現(xiàn)毫秒級(jí)人臉檢測(cè)
加密算法之MD5算法
無(wú)線傳感器網(wǎng)絡(luò)低功耗分簇路由算法設(shè)計(jì)