嵌入式汽車縱向碰撞預警系統研究


4 系統設計
汽車縱向碰撞系統的實時性要求處理器具有較快的運行速度和較強的實時調度能力,研究中選用美國德州儀器公司(TI)設計和出品的利用達芬奇技術(Davinci),基于DSP和ARM9雙核的TMS320DM6446ZWT片上系統(SoC)的評估板作為系統的硬件平臺,選用Linux系統作為嵌入式操作系統。
系統首先接收圖像傳感器傳送過來的圖像,將彩色圖像轉化為待處理的灰度圖像,利用中值濾波、Sobel算子邊緣檢測、自適應閾值分割等圖象處理的方法,消除噪聲平滑圖像,經過邊緣檢測和圖像分割獲得二值化圖像。
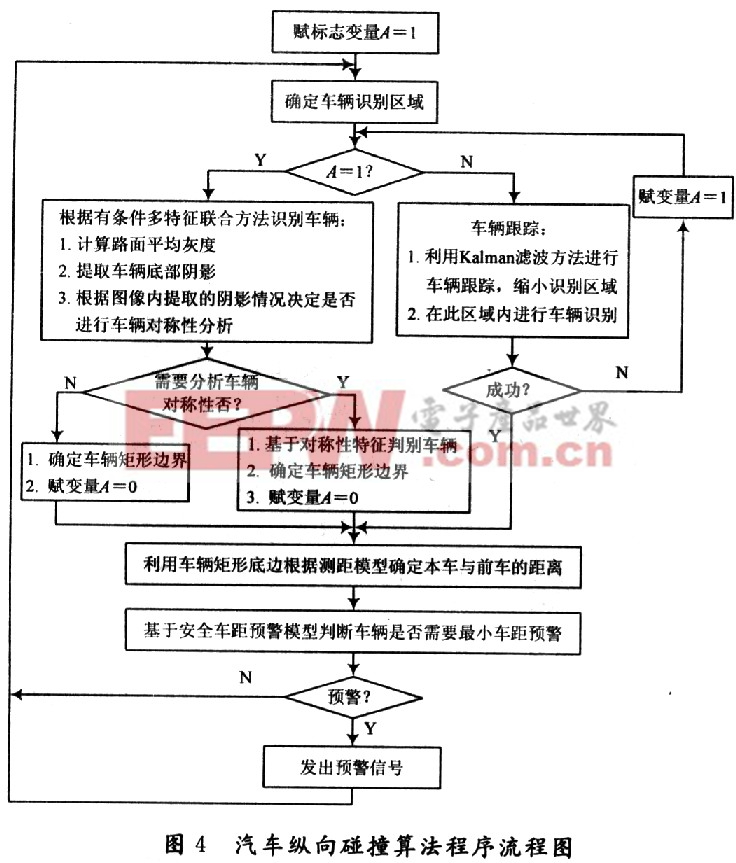
在二值化圖像和灰度圖像基礎上對前方車輛輪廓進行識別,確定前車輪廓尺寸及其底邊位于平面圖像中的位置,根據汽車縱向碰撞預警模型實現跟車距離的計算和安全車距的預警。軟件流程圖如圖4所示。
5 結語
提出了基于前車運動狀態和安全系數權重的汽車縱向碰撞預警算法,保證駕駛安全的同時確保公路行車的通行能力,計算報警距離與駕駛員認可的跟馳安全距離相一致,改善了系統的可信任度;嵌入式系統的應用有效地減少了系統的體積,有利于系統的應用和推廣。







評論