單兵作戰用機器人控制系統設計

TMS320F2812包括4M可尋址程序空間和4M可尋址數據空間。同時片內具有128×16位的FLASH存儲器和18K×16位的SRAM。TMS320F2812采用3_3 V和1.8 V供電,功耗低。TMS320F28 12的外部接口非常豐富,16路12位的ADC采集通道,SPI、SCI通信模塊,多達56個復用I/O引腳。
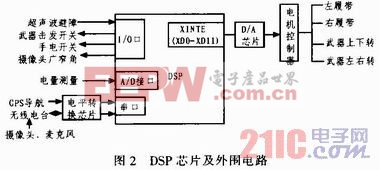
單兵作戰用機器人控制系統組成如圖2所示。
1.1 I/O端口
TMS320F2812的GPIOA0-GPIOA3口設置成基本輸入輸出端口,端口配置及屬性如表1所示。
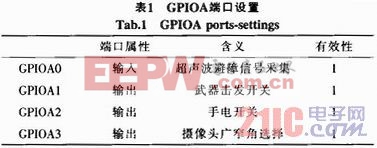
超聲波避障信號用于探測機器人前方0.5 m內是否有障礙物,如遇到障礙物,機器人可自動轉彎避開。武器擊發開關用于機器人上武器的擊發控制,手電開關用于機器人上手電的開關控制,攝像頭廣窄角選擇用于機器人上攝像頭的廣角與窄角的切換。
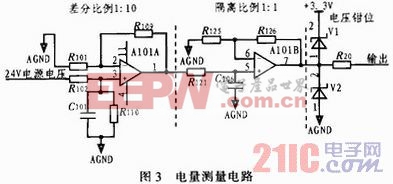
1.2 A/D端口
TMS320F2812的A/D轉換器模塊共有16個通道,模擬電壓的輸入范圍是0~3 V。這里用了其中的2個通道,分別用來測量機器人上的2塊24 V鋰電池的電量。圖3中電量測量電路分為3個部分:差分比例1:10電路,把24 V電壓轉換到0~2.4 V區間;隔離比例1:1電路,能有效的隔離輸入電壓與DSP的前端接口;電壓鉗位電路,將輸入到DSP端口的電壓鉗位在3.3 V以內,防止電源電壓意外浪涌時損壞DSP的A/D轉換端口。2路24 V電池電壓分別經過2路電量測量電路后,輸入到DSP的ADCINA0、ADCINA2兩個端口,根據采集到的電壓值,可計算當前電池的電壓,從而確定電池電量。










評論