單兵作戰用機器人控制系統設計

摘要:單兵作戰用機器人方便攜帶、操控簡單、可代替人類到達危險環境作戰。機器人通過無線電臺接收遙操控終端發送的控制指令,按照指令行動;同時機器人采集自身的狀態信息,發回遙操控終端。手持遙操控終端的士兵能夠方便的控制機器人,并實時掌握機器人的狀態信息。文中詳細介紹了單兵作戰用機器人的控制系統硬件和軟件設計。
關鍵詞:單兵作戰;機器人;控制系統;DSP
單兵作戰用機器人體積小,方便單兵野外作戰時攜帶,可完成偵察、作戰、排爆等任務。機器人能夠代替人類到達不方便到達或危險的環境,確保了士兵的安全。車體是履帶式設計,行動平穩。
1 單兵作戰用機器人控制系統硬件設計
為了實現士兵對機器人的實時控制,需要配合使用遙操控終端。機器人與遙操控終端的工作原理如圖1所示。
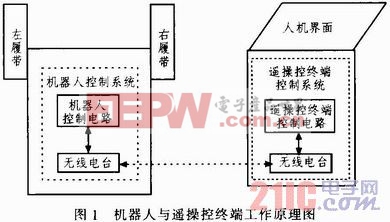
遙操控終端通過按鈕、開關、搖桿采集工作人員的操控指令,將操控指令轉換成數據,按照規定的格式通過串口發給無線電臺,無線電臺將該數據發送出去;機器人控制系統的無線電臺接收到來自操控終端的控制指令后,按照操控指令控制機器人運動、武器擊發,同時機器人控制系統采集機器人的GPS位置、電池電量、超聲波避障信息等,把機器人信息打包后通過機器人上的無線電臺發送給遙操控終端的電臺,遙操控終端接收到機器人信息后,將其顯示在人機界面上,以備士兵隨時掌握機器人的實時信息。
單兵作戰用機器人控制系統是基于DSP芯片及與其外圍電路、電源電路組成。DSP芯片選用TMS320F2812。TMS320F2812是美國TI公司推出的C2000平臺上的定點32位DSP芯片,主頻150 MHz、處理性能可達150 MIPS,每條指令周期6.67 ns。










評論