工業機器人澆鑄控制系統的設計與應用

2 工業機器人運動學
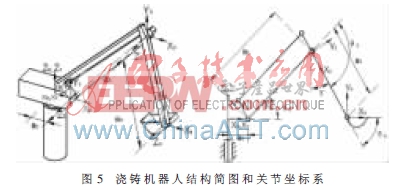
從本文構建的軟件體系結構來看,控制核心層的一部分內容就是運動學算法,本文設計的澆鑄控制系統已經成功應用于東風集團某廠的鋁制活塞的澆鑄生產,下面以其所使用的意大利法塔鋁UNO三軸澆鑄機器人為例建立機器人運動學。機器人結構簡圖和關節坐標系如圖5所示。
2.1 運動學正解
機器人三個關節坐標軸(實軸)分別為關節1(控制機器人左右運動)、關節2(控制機器人上下運動)和關節4(控制機器人末端容器翻轉)。關節3并沒有驅動單元,連桿與鉛直線的夾角?酌是一個確定的值。關節3的作用在于當機器人關節1和關節2運動時,保證末端容器姿態不變,防止容器中高溫金屬液體潑濺造成不必要的損失。按照D-H方法建立運動方程[4,5],運動學正解得到末端容器在機器人基坐標系中位姿矩陣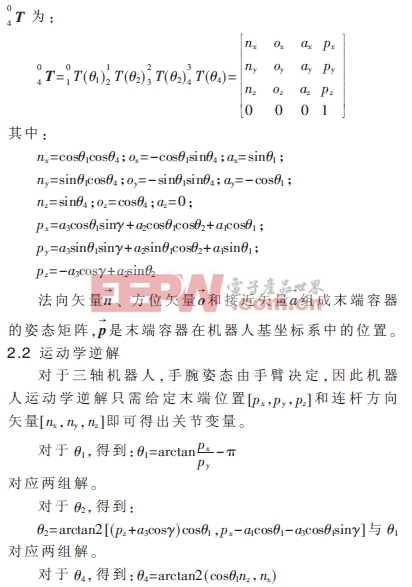
3 系統信號控制的實現
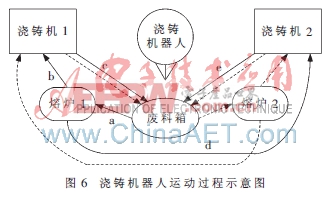
控制核心層的另外一個重要方面就是PLC。本文設計的澆鑄控制系統采用開關量交換信號,簡單易行,并能滿足工業機器人信號控制的應用需求。在前面提到的應用實例中,機器人系統與兩臺澆鑄機、兩臺鋁液熔爐和廢料箱構成的澆鑄系統進行頻繁的信號交互。
3.1 澆鑄系統功能需求
工作過程中,澆鑄機器人運動過程示意圖如圖6所示。











評論