基于模糊優化的PID直流無刷電機控制

無刷直流電動機克服了普通直流電動機以機械方式換向,特別適合利用電子控制器件進行靈活控制,目前在機器人關節控制等高精度的自動化儀器中應用尤為普遍。比較典型的控制算法是采用傳統的比例-積分-微分(PID)控制器進行控制。然而,PID控制器的性能完全取決于對其增益參數的調節。近年來,人們也提出用人諸如神經網絡算法、遺傳算法、和模糊邏輯控制等許多人工智能控制來設計PID控制器。其中,模糊邏輯控制以其對非線性和不確定參數的良好處理能力而著稱,特別適合于去控制像直流無刷電動機這樣的有著高度非線性性能和大量隨機擾動的系統。本文將介紹一種基于采用模糊邏輯優化的無刷直流電機的控制方法,并進行仿真。
1 直流無刷電動機及其數學建模
無刷直流電機是一種典型的機電一體化產品,它是由電動機本體,位置檢測器,逆變器和控制器組成。下面將以兩項導通的星形三相六狀態方式為例,分析無刷直流電動機的數學模型。
1.1 三相繞組端電壓方程
由于轉子的磁阻不隨轉子的位置變化而變化,因此定子繞組的自感和互感為常數。考慮到三相繞組為星形連接ia+ib+ic=0,因此Lmia+L-mib+Lmic=0;三相繞組的端電壓平衡方程:
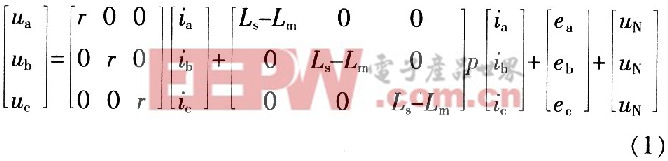
式中,ua,ub,uc為定子相繞組電壓,V;ia,ib,ic為定子相繞組電流,A;ea,eb,ec為定子相繞組反電動勢,V;r為每相繞組的電阻Ω;Ls為每相繞組的電感,H;Lm為每兩相繞組間的互感,H;uN為電機系統的中性點電壓。
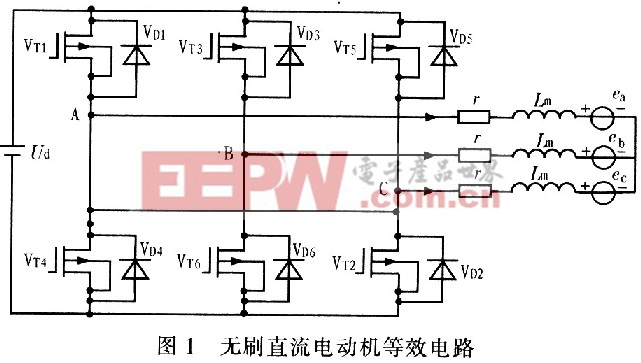
由此可得BLDCM的等效電路如圖1所示。圖中Ud為直流側電壓,VT1~VT6為功率開關器件,VD1~VD6為續流二極管。
1.2 繞組反電動勢方程
忽略鐵心飽和及齒槽效應,定子各相電阻,電感均相等,轉子上無阻尼繞組,定子繞組感應電勢為典型的120°梯形波。由此,便可以得到定子A相繞組的反電動勢在0~2π區間內的函數表達式
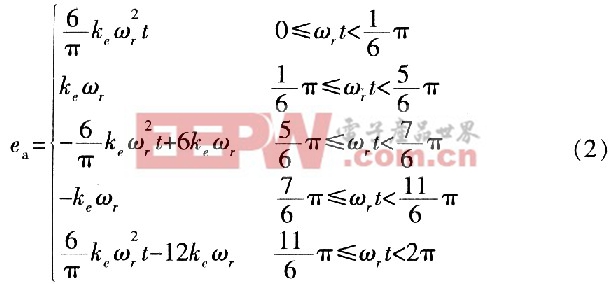
式中,ωr為轉子機械角速度;ke為反電動勢系數。同理可得到eb和ec的函數表達式。
1.3 轉矩方程和運動方程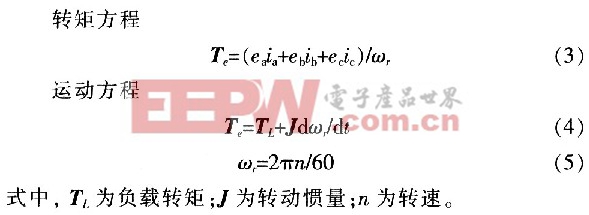






評論