基于矢量控制的永磁同步電機調速系統研究

接著,我們考查積分變化對于系統性能的影響。PI控制器中,我們固定比例增益KP=5,積分增益K1=5,20,30變化時,分別測試電機在給定速度為1 000 r/min下的動態曲線,得出對比效果如圖5,圖6所示。
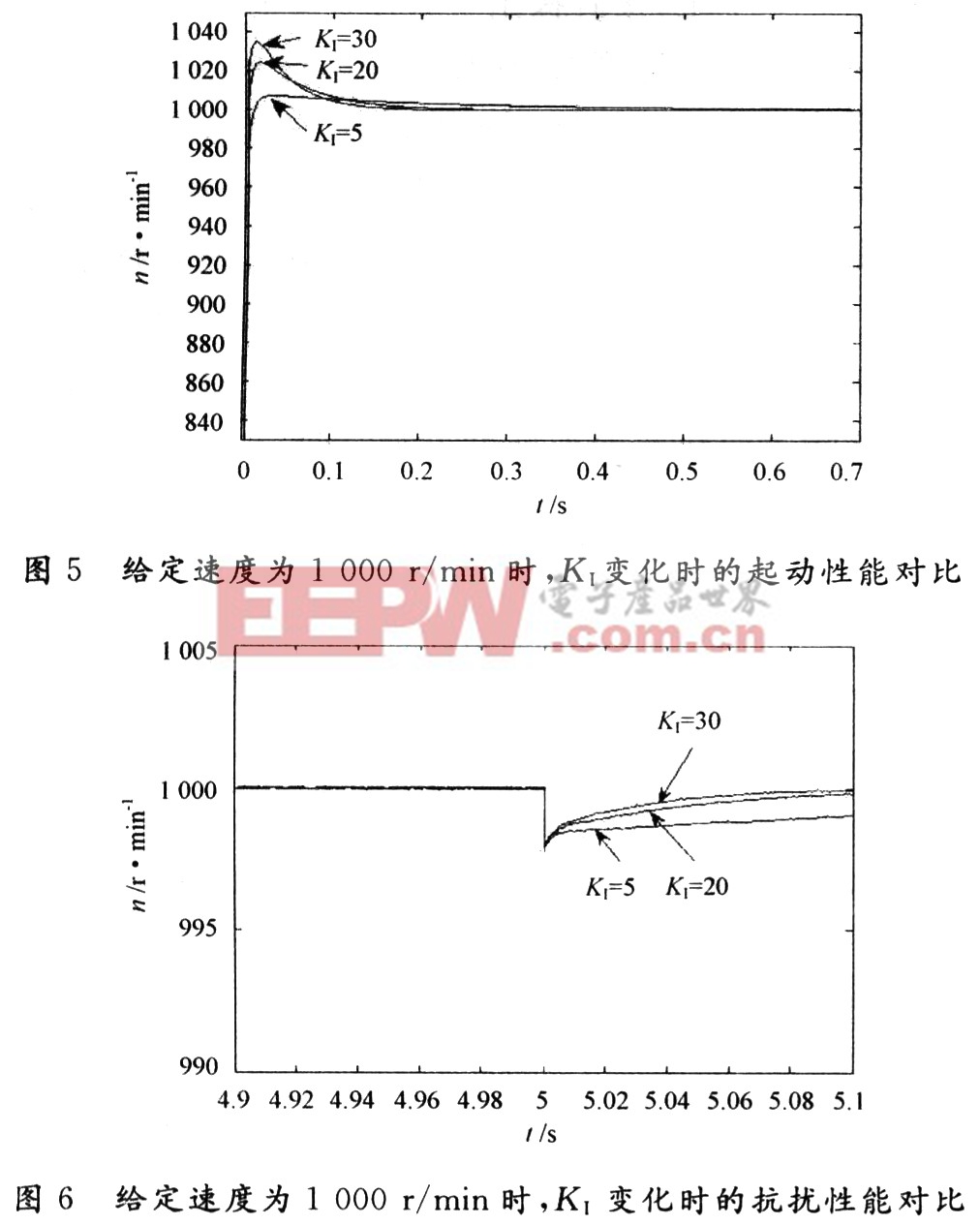
由圖5,圖6可知,積分增益K1的加大,有利于消除系統靜差,減小恢復時間,對于系統的抗擾動能力改善有限,且會增加系統的超調。
從仿真結果可見:PI控制器的參數對系統的性能有極大的影響,實際應用時需要調出一組性能良好的參數,尤其是對于采用PI控制器的交流調速系統,它在不同的環境下需要調節不同的PI參數。因此掌握PI控制器的參數調節規律比較重要。但眾所周知,永磁同步電機是一個具有強耦合的非線性對象,很難用精確的數學模型描述,并且電機的應用環境一般較為復雜且常常存在各種干擾,電機參數在電機運行過程中會發生變化。而PI控制器是一種線性控制器,魯棒性不夠強,具有對負載變化適應能力差,抗干擾能力弱和控制性能容易受模型參數變化影響等弱點。因此,PI控制器應用在交流電機調速中會由于自身的特點而存在一些不足,例如:PI控制器參數所能適用的控制對象范圍不夠大,在某一狀態下整定為最優的PI參數在另外一種狀態下不一定是最好的;同一個PI參數一般難以適用于不同的電機轉速,對于不同的轉速范圍,PI參數需要分別調節,這就增加了現場調試的難度。












評論