基于凌陽16位單片機的智能車設計

引言
本文引用地址:http://cqxgywz.com/article/172517.htm 輪式小車是智能小車機械結構的主體部分,由車身、輪子、變速器、傳動軸等結構部件構成。輪式小車還包括提供動力的驅動器,用來收集智能小車的自身狀態信息或外部環境信息,并對多傳感器的數據進行分析、融合,動態調整小車的運動狀態,實現在一定條件下的自主行駛。
硬件設計
圖1是智能車總體的設計方案及組成原理。微處理器采用了16位SPCE061A單片機,以此為核心設計了紅外傳感模塊、電機驅動模塊、PI控制器及相關的顯示指示模塊。
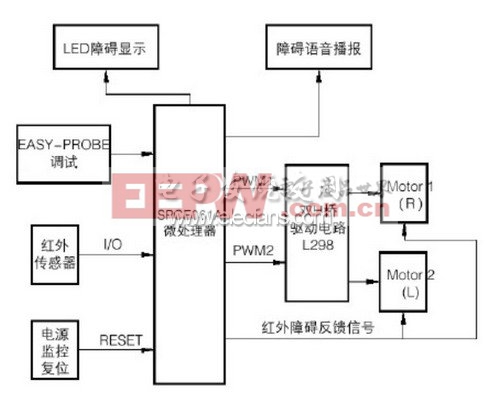
圖1 智能車總體的設計方案
輪式小車機械結構的設計
智能小車機械結構包括車輪、車身、轉向舵機、驅動器和各種傳動機構等。小車車身主體由2mm厚的有機玻璃組成。小車有三個車輪,其中后面的兩輪為驅動輪,分別有獨立的直流電機驅動。
若直接將直流電機輸出軸連接小車的輪胎,會出現電機的轉矩偏小、小車的動力差等缺點,采用PWM直流電機調速方法又會使電機的輸出轉矩在原有壓降的基礎上又有所下降。為了解決轉矩速度之間的矛盾,筆者設計了二級定軸輪系轉動減速裝置,其結構示意圖如圖2所示。
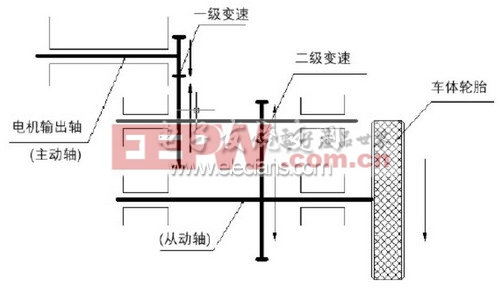
圖2 減速機構原理圖
其中齒輪均為圓柱直齒輪。若主動軸用1表示,末輪以K表示,輪速為ω,圓柱直齒輪嚙合次數為m,則上述輪系機構的傳動比ilk為

(1)
此處電機輸出軸是主動軸,車體輪胎是從動軸。
其中一級變速主動輪齒數Z1主=11,從動輪齒數Z1從=35;二級變速主動輪齒數Z2主=11,從動輪齒數Z2從=40;圓柱直齒輪嚙合次數為m=2。可以計算出ilk=11.5。












評論