FPGA多接口功能在航姿計算機中的應用

引言
捷聯慣導中的航姿計算機實現數字平臺導航,需要在復雜運算的同時還能夠高速、準確地完成多種傳感器測量數據的采集以及航姿結果和系統狀態的傳送。通常的做法都是用一片或多片 DSP芯片來完成,但是當數據接口較多而且數據傳輸頻率較高時,這類系統的實時性就難以得到保證;而 FGPA具有豐富的硬件資源,能夠真正實現多模塊并行工作,而且可以達到較高的工作頻率。另外,用 FPGA 設計航姿計算機,還具有以下突出的優點:低成本、低功耗、小體積、可重新編程、升級方便、VHDL 設計電路可復用等。本文詳細介紹了在接口較多的航姿計算機中,怎樣設計 FPGA使得多種通訊接口功能都能實時可靠地實現,具有實際工程意義。
1系統總體設計
圖 1為該捷聯航姿系統的硬件結構框圖。該系統需要高速、實時地采集多種傳感器(包括大氣傳感器、IMU、磁羅盤)的測量數據,以及一些有關的模擬量,用于 DSP中高精度的航姿解算,同時也需要將航姿信息和系統信息發往多個設備(包括飛參記錄儀、顯示儀表和DS)發送。采集數據需要同時用到的接口包括ARINC429、RS422、SPI、與 DSP并行接口等多種接口;如此多數量、多種類的接口的完成還必須保證準確性和實時性。這整個系統的時序、邏輯控制都是由 FPGA完成的,DSP(選用 TI公司的TMS320C6713)作為從處理器專門用于航姿解算。本系統中選用的 FPGA芯片為 ACTEL公司 PA系列中的 APA300芯片,用 VHDL語言在 LibroIDE環境下對該芯片進行開發。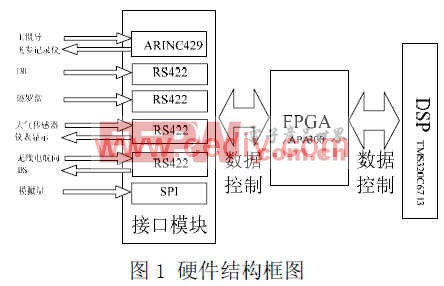
2多種工業接口的 FPGA實現
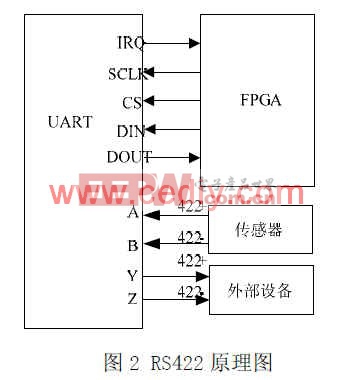
(1)RS422通訊接口。RS422標準是利用差分傳輸方式提高通信距離和可靠性的一種通信標準。該航姿計算機需要用 RS422接口與IMU、大氣傳感器、磁羅盤、無線電航表等六個外部設備通訊。由于 RS422可以支持雙工工作模式,為了充分利用資源,因此設計了四個完全相同的并行的接口模塊,其中每一個接口模塊都是通過 FPAG控制 MAX3140芯片得以實現(如圖2);同時出于設計效率的考慮,只設計了一個通用的實體,而讓每一個控制模塊都作為該實體的一個實例。這樣,雖然這四個模塊的結構完全相同,但是在頂層實體中施加不同的控制,就實現了兩個單工和兩個雙工的工作模式。該通用的實體按照 MAX3140的工作時序圖,通過控制和監測 UART的五個管腳(SCLK數據接收時鐘、CS片選信號、DIN控制數據輸入、IRQ中斷、DOUT數據輸出),完成對芯片的上電自檢和對信號的接收發送;頂層實體并行地控制四個實體的工作,從而互不影響地實現了上述多路信號的接收和發送。









評論