利用邊緣 AI 即插即用方案增強(qiáng)無線狀態(tài)監(jiān)測

在工業(yè)與汽車領(lǐng)域,狀態(tài)監(jiān)測(Condition-based Monitoring,CbM)正逐步取代傳統(tǒng)的被動維護(hù)與周期性保養(yǎng),成為降低停機(jī)風(fēng)險、延長設(shè)備壽命的重要技術(shù)。然而,一個高效的 CbM 系統(tǒng)往往需要在精密傳感、低噪聲信號鏈、電源管理與無線通信之間實(shí)現(xiàn)最佳集成。這些跨學(xué)科的復(fù)雜度不僅增加開發(fā)成本,也延遲系統(tǒng)落地。此外,隨著邊緣人工智能(Edge AI)在工業(yè)監(jiān)測中的應(yīng)用不斷增長,設(shè)計(jì)難度進(jìn)一步提升。顯然,需要一種更直接、高效、可快速部署的解決方案。
本文首先簡要介紹 CbM 的意義和技術(shù)挑戰(zhàn),隨后重點(diǎn)解析 Analog Devices 推出的即插即用無線 CbM 平臺 —— Voyager 4 評估套件 EV-CBM-VOYAGER4-1Z,其支持邊緣 AI 推理,可作為快速部署預(yù)測性維護(hù)的整體方案。
1. 為什么狀態(tài)監(jiān)測至關(guān)重要
工業(yè)系統(tǒng)的無計(jì)劃停機(jī)事件往往直接造成產(chǎn)線暫停、供應(yīng)鏈中斷以及高昂的維修成本。傳統(tǒng)的維護(hù)策略主要包括兩類:
事后維護(hù)(Reactive Maintenance):設(shè)備故障后再維修,導(dǎo)致高額停機(jī)損失。
計(jì)劃性維護(hù)(Scheduled Maintenance):按固定周期更換部件,可能造成資源浪費(fèi),因?yàn)樵S多部件在更換時仍處于可正常工作狀態(tài)。
相比之下,狀態(tài)監(jiān)測通過實(shí)時采集振動、溫度、電流等運(yùn)行指標(biāo),識別設(shè)備劣化的早期跡象,使企業(yè)能夠提前采取措施,從而:
減少非計(jì)劃停機(jī)
延長設(shè)備壽命
降低總體擁有成本(TCO)
然而,要實(shí)現(xiàn)上述收益,CbM 設(shè)備必須在高噪聲、高振動、電磁干擾和溫度變化顯著的工業(yè)環(huán)境下穩(wěn)定運(yùn)行,這對設(shè)計(jì)者構(gòu)成了多學(xué)科融合的挑戰(zhàn)。
2. 狀態(tài)監(jiān)測的技術(shù)挑戰(zhàn)與系統(tǒng)需求
為了達(dá)到預(yù)測性維護(hù)的效果,CbM 系統(tǒng)必須在嚴(yán)苛場景中維持 高精度、低噪聲、寬帶寬 的測量能力。典型工業(yè)設(shè)備——如電機(jī)、傳動鏈和大型旋轉(zhuǎn)機(jī)械——在正常運(yùn)行時就會施加持續(xù)的機(jī)械應(yīng)力和電磁干擾。
2.1 高精度振動檢測需求
振動分析是識別軸不平衡、錯位、軸承磨損等早期故障的基礎(chǔ)。因此,傳感器要在復(fù)雜條件下捕捉微小振動變化,從而需要:
高帶寬(kHz 級)
低噪聲模擬前端
穩(wěn)定的數(shù)字化采樣鏈路
2.2 人工智能分析正向邊緣遷移
過去,振動數(shù)據(jù)通常發(fā)送到主機(jī)或云端進(jìn)行分析;然而當(dāng)前趨勢是把分析前移到設(shè)備側(cè),即 邊緣推理(Edge AI),其優(yōu)勢包括:
最小化分析時延
降低網(wǎng)絡(luò)傳輸壓力
提升系統(tǒng)實(shí)時性與安全性
基于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的振動模式識別能夠?qū)崟r檢測異常,但推理過程計(jì)算量大,要求設(shè)備在功耗、尺寸和成本有限的條件下保持高性能。
2.3 無線通信與功耗限制
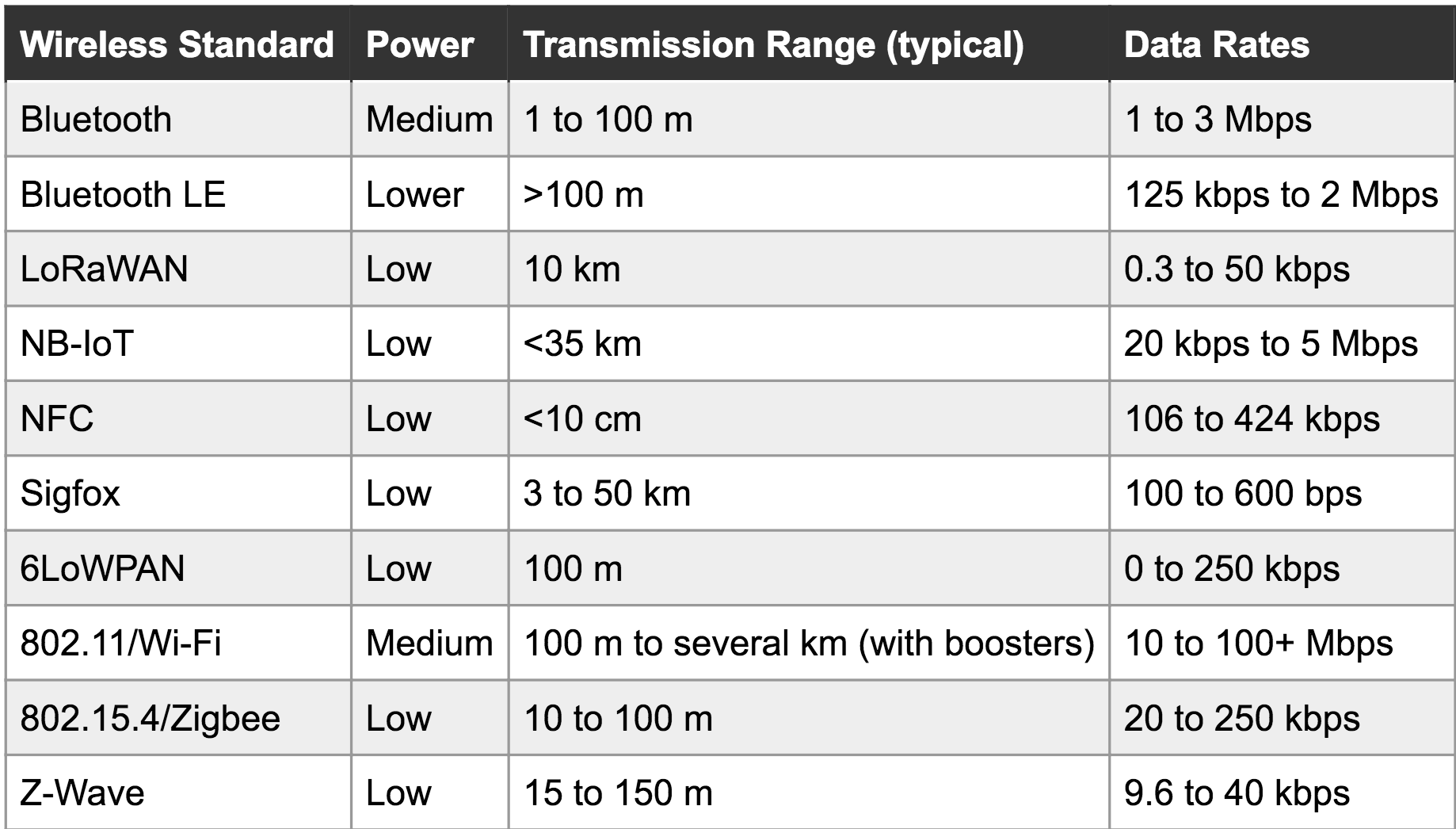
無線 CbM 在旋轉(zhuǎn)機(jī)械、遠(yuǎn)程設(shè)備和無法布線的應(yīng)用中尤為重要。BLE(Bluetooth Low Energy)在多項(xiàng)指標(biāo)上成為理想選擇(見表 1)。
 4
4

表 1:常見無線標(biāo)準(zhǔn)在 CbM 應(yīng)用中的關(guān)鍵性能比較(來源:Analog Devices)
| 標(biāo)準(zhǔn) | 典型范圍 | 功耗 | 可靠性 | 抗干擾性 | TCO | MESH | 安全性 |
|---|---|---|---|---|---|---|---|
| Wi-Fi | 100 m | 高 | 低(單 RF 信道) | 低 | 高 | 是 | WPA |
| BLE | 20–100 m | 低/中 | 中/高 | 低 | 中 | 是 | AES |
| Zigbee/Thread | 20–200 m | 低/中 | 低 | 低 | 中 | 是 | AES |
| Smart-MESH | 20–200 m | 低 | 高 | 高 | 低 | 是 | AES |
| LoRaWAN | 500–3000 m | 中 | 低 | 低 | 高 | 否 | AES |
然而,實(shí)現(xiàn) BLE 的低功耗仍然困難,尤其對邊緣 AI 推理任務(wù)而言,必須將電源管理與無線收發(fā)的功耗控制到極低水平。
3. Voyager 4:支持邊緣 AI 的無線狀態(tài)監(jiān)測即插即用方案
為應(yīng)對上述挑戰(zhàn),Analog Devices 推出 EV-CBM-VOYAGER4-1Z(Voyager 4) —— 一個集成傳感、處理、功耗優(yōu)化與無線通信的完整電池供電振動監(jiān)測平臺,可用于 CbM 技術(shù)評估或直接部署預(yù)測性維護(hù)。


 4
4
如圖 1 所示,該套件采用 垂直支架結(jié)構(gòu),使主板和電池穩(wěn)固安裝;傳感器和電源板位于支架底部,靠近振源。最終部署時,整體結(jié)構(gòu)裝入直徑 46 mm、高 77 mm 的鋁制外殼中,頂部采用 ABS 蓋以確保 BLE 信號暢通。
4. 模塊化架構(gòu):傳感、處理與無線通信協(xié)同設(shè)計(jì)
Voyager 4 由兩顆低功耗 MCU 組成:
MAX32666:BLE MCU,負(fù)責(zé)無線連接、系統(tǒng)控制與數(shù)據(jù)轉(zhuǎn)發(fā)
MAX78000EXG+:AI MCU,內(nèi)置 CNN 加速器,用于本地推理
配合多款低功耗模擬與電源器件形成整體系統(tǒng),如圖 2 所示。



4.1 高帶寬振動傳感鏈路
主振動傳感器為 ADXL382-1BCCZ-RL7:
三軸 MEMS 結(jié)構(gòu)
16 位 ADC
8 kHz 帶寬
功耗:高性能模式 520 μA(8 kHz)、低功耗模式 32 μA(400 Hz)
ADXL382 輸出由 ADG1634B CMOS 開關(guān)切換至不同子系統(tǒng),由 MAX32666 協(xié)調(diào)。
Voyager 4 同時使用 ADXL367BCCZ-RL7 作為超低功耗“喚醒加速度計(jì)”,其在運(yùn)動觸發(fā)模式下電流僅 180 nA。
4.2 訓(xùn)練模式與推理模式
系統(tǒng)具有兩種典型運(yùn)行路徑(見圖 3):

訓(xùn)練模式(路徑 a)
MAX32666 讀取 ADXL382 的原始振動數(shù)據(jù)
通過 BLE 或 USB 傳輸至用戶主機(jī)
用于構(gòu)建自定義 CNN 推理模型
推理模式(路徑 b)
MAX78000EXG+ 直接讀取 ADXL382 原始數(shù)據(jù)
使用 CNN 加速器執(zhí)行異常識別
若檢測到異常,向 MAX32666 發(fā)出告警并上報(bào)
若無異常 → 系統(tǒng)進(jìn)入低功耗休眠,由 ADXL367 負(fù)責(zé)觸發(fā)下一周期
這一架構(gòu)使 BLE 收發(fā)器僅在訓(xùn)練階段與異常上報(bào)時工作,顯著降低功耗。
5. 超低功耗設(shè)計(jì):系統(tǒng)與器件雙層優(yōu)化


Voyager 4 采用多級節(jié)能設(shè)計(jì):
5.1 系統(tǒng)級
運(yùn)動激活喚醒機(jī)制
按需啟動 BLE
睡眠期間僅 ADXL367 處于 180 nA 模式
每小時運(yùn)行一次檢測時,系統(tǒng)平均功耗約 0.3 mW
使用 1500 mAh 電池時可達(dá)到 約兩年壽命
訓(xùn)練模式因頻繁使用 BLE 功耗較高(約 0.65 mW)。
5.2 器件級
MAX32666:執(zhí)行緩存運(yùn)行時 27.3 μA/MHz @ 3.3 V
MAX78000EXG+:M4 核心循環(huán)執(zhí)行 22.2 μA/MHz @ 3.0 V
兩者均帶動態(tài)電壓調(diào)節(jié)(DVS)
MAX20335 PMIC 提供電源管理
MAX17262 負(fù)責(zé)電池電流監(jiān)測與壽命估算
這些設(shè)計(jì)確保系統(tǒng)即使在執(zhí)行 CNN 推理時仍保持極低功耗。
6. 邊緣 AI 模型的訓(xùn)練與部署流程
在資源受限的 MCU 上執(zhí)行 CNN 推理,需要專門的模型優(yōu)化流程。Analog Devices 在 GitHub 上提供完整的工具鏈與示例,涵蓋訓(xùn)練、綜合與固件集成三大階段(圖 5)。


階段 1:模型訓(xùn)練(ai8x-training)
設(shè)置 Python 環(huán)境
使用 train.py 腳本執(zhí)行 CNN 模型訓(xùn)練
提供大量教程幫助開發(fā)者理解模型與硬件資源之間的匹配關(guān)系
階段 2:模型綜合(ai8x-synthesis)
將訓(xùn)練好的模型轉(zhuǎn)換為 C 語言
針對 MAX78000EXG+ 的 CNN 硬件結(jié)構(gòu)進(jìn)行優(yōu)化
階段 3:固件開發(fā)與部署(SDK)
將模型嵌入 AI MCU 固件
通過 USB 或 BLE 更新至 Voyager 4
Windows 主機(jī)端 Python GUI 可發(fā)送指令與查看推理狀態(tài)
當(dāng)進(jìn)入正常運(yùn)行模式時,MAX78000EXG+ 在每次喚醒后自動執(zhí)行推理,實(shí)現(xiàn)完全本地化的振動異常監(jiān)測。
7. 結(jié)語
設(shè)備故障導(dǎo)致的非計(jì)劃停機(jī)給制造與運(yùn)營帶來顯著風(fēng)險,而狀態(tài)監(jiān)測是實(shí)現(xiàn)預(yù)測性維護(hù)的核心技術(shù)。然而,設(shè)計(jì)一個同時具備無線通信、精密傳感、低功耗管理及邊緣 AI 分析的 CbM 系統(tǒng)仍是一個復(fù)雜工程。
Analog Devices 的 Voyager 4 無線振動評估套件為開發(fā)者提供了一個可直接部署的解決方案,涵蓋:
高帶寬 MEMS 振動采集
超低功耗運(yùn)行機(jī)制
BLE 無線通信
本地 CNN 加速與異常檢測
完整的邊緣 AI 模型訓(xùn)練與部署流程
它使企業(yè)能夠更快速地構(gòu)建預(yù)測性維護(hù)系統(tǒng),大幅降低 CbM 部署門檻,加速工業(yè)設(shè)備智能化進(jìn)程。




評論