基于嵌入式的懸架與轉向集成控制器研究

為了改善車輛的操縱穩定性和行駛平順性,提高汽車底盤控制的集成度,本文對底盤部分的半主動懸架SASS(Semi-Active Suspension System)和電動動力轉向EPS(Electric Power Steering)系統進行了集成控制研究。
本文引用地址:http://cqxgywz.com/article/83739.htm設計并試制出基于嵌入式系統ARM S3C44B0X的SASS和EPS集成控制器,并進行了臺架試驗,結果表明研制的集成控制器效果良好,可用于汽車底盤集成控制系統的開發研究。
車輛底盤控制通過電控系統改善底盤的動力學特性,提高車輛的主動安全性和駕駛舒適性,是當前汽車研究領域的熱點之一,是今后底盤系統的發展方向。目前國內汽車底盤集成主要集中在對防抱死制動系統(ABS)、牽引力控制系統(TCS)、驅動防滑轉系統(ASR)和自動巡航系統(ACC)的集成上[1-4],對車輛懸架系統和轉向系統集成控制的報道尚不多見。本文對半主動懸架和電動助力轉向的集成控制器進行了設計,采用嵌入式系統SAMSUNG S3C44B0X,選用模糊控制算法和PID算法分別控制SASS和EPS,試制出基于嵌入式系統的集成控制器,臺架試驗表明該集成控制器取得了較好的效果,可以達到設計要求。
1. 集成控制方案設計
研究的懸架系統是減振器可調阻尼式半主動懸架(廣義上稱為主動懸架,ASS),轉向系統是電動助力式轉向。
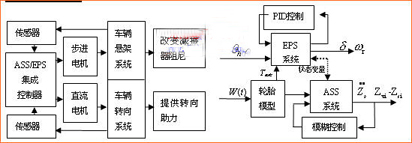
圖1 ASS/EPS集成控制示意圖 圖2 集成系統控制策略
圖1所示為ASS/EPS集成控制示意圖,將主動懸架系統和電動助力轉向視為一個整體,考慮了二者部分狀態變量上的耦合,設計集成控制器,對半主動減振器步進電機和電動助力轉向的直流電機進行協調控制,改變可調減振器阻尼和提供轉向助力,達到改善轉向車身姿態變化、協調操穩性和平穩性間矛盾的目的。基于集成模型考慮到軟件編程的難易程度,本文采用模糊+PID控制策略,見圖2所示[5],對EPS的的助力電壓U進行PID控制,修正助力,改善橫擺角速度的響應,提高轉向靈敏度;用模糊控制器根據反饋的狀態變量控制ASS系統,改善質心垂直加速度和懸架動撓度響應,提高車輛的行駛平順性。
2. 控制系統硬件設計
控制器硬件部分設計見圖3所示,主要包括輸入信號的采集調理模塊、微處理器的接口模塊、和對執行機構的輸出控制模塊。
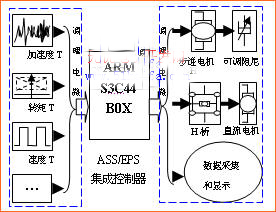
圖3 控制器的硬件模塊
車輛正常行駛時,傳感器采集控制系統外部的車身垂直振動加速度、轉向軸轉矩、車速等狀態信號,經調理傳送到控制器的電控單元ECU,ECU進行分析計算處理,產生控制信號傳輸給執行機構,執行機構按控制要求驅動懸架減振器的步進電機和轉向系的直流電機,改變減振器的阻尼,同時提供轉向助力,實現ASS和 EPS的協調集成控制。
控制器是集成系統的核心,微處理器MCU是控制器的核心,考慮到MCU的速度、集成的資源、輸入輸出口及其開發環境,本文選用SAMSUNG的 S3C44B0X作為控制器的微處理芯片。S3C44B0X 微處理器片內集成ARM7TDMI核[6],采用0.25umCMOS工藝制造,在ARM7TDMI核基本功能的基礎上集成了豐富的外圍功能模塊,便于低成本設計應用系統。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)

pid控制器相關文章:pid控制器原理




評論