關于智能車模起跑線識別方法的設計與實現
——

設計思想及算法實現
本文引用地址:http://cqxgywz.com/article/95520.htm常用的車模巡線方案有光電傳感器陣列和CCD探測法等[2],這里介紹光電傳感器陣列的設計方案。光電傳感器是靠紅外發射管和紅外接收管組成的傳感器,如圖3所示。
紅外發射管發射的紅外線具有一定的方向性,當紅外線照射到白色表面上時會有較大的反射,如果距離Dl取值合適,紅外接收管可接收到反射回的紅外線,再利用紅外接收管的電氣特性,在電路中處理紅外線的接收信息;如果反射表面為黑色,紅外光會被表面將其大部分吸收,紅外接收管就難以收到紅外線。這樣,就可以利用紅外收發管組成的光電傳感器檢測賽道黑線,實現智能車的巡線方案。
(a) 白色反射面下的紅外反射
(b) 黑色反射面下的紅外吸收
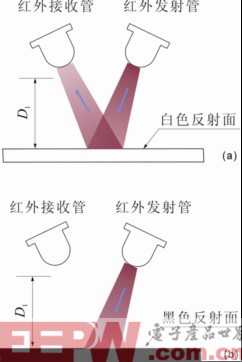
圖3 用于路況識別的紅外光電傳感器




















評論