關于智能車模起跑線識別方法的設計與實現
——

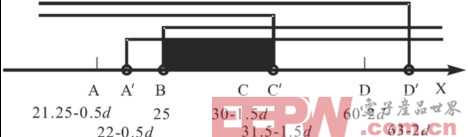
圖8 改變數據后數軸標注D的取值范圍
如果偏斜角度繼續增大,前排光電傳感器陣列不能同時進入起始標志線,這樣在單片機編程算法中很容易處理這種情況。
綜合以上討論,可知:
光電傳感器的管距(管內側距離)D取值范圍為(25, 30-1.5d);
根據誤差理論,單純從傳感器的外徑尺寸上考慮,其值d越小越好;
本設計中取光電管直徑d值為3mm,D值范圍(25mm, 25.5mm)。
實測效果
根據以上分析的光電傳感器的管距D取值范圍制作車模的尋線傳感器陣列,對車模進行了大于50次的測試,實測結果表明:車模均能正確識別到起跑線。
但是,設計還存在一些問題,主要有:
對D的取值要求苛刻;
要求紅外傳感器的正常工作率為90%以上。




















評論