你有沒有過這樣的經歷?打開導航軟件走路,明明站著沒動,定位點卻在屏幕上“漂移”;戴運動手表測心率,偶爾會跳出一個離譜的數值;甚至用體重秤,換個站姿數字就差了兩斤。這些“不靠譜”的情況,本質上都是同一個問題:傳感器數據總會“說謊”。而卡爾曼濾波,就是專門給數據“打假”的技術——它像一位精明的偵探,從雜亂的信息中篩選出真相,讓數據變得靠譜起來。今天我們不用復雜公式,就用快遞員送貨的故事,把卡爾曼濾波講明白。一、先搞懂:為什么數據會“偏離”?在說卡爾曼濾波之前,得先明白數據“偏離”的兩個根源,這也是卡爾曼濾波要
關鍵字:
卡爾曼濾波 數據降噪 誤差修正 機器人
1? ?濾波這里用到了卡爾曼濾波,卡爾曼濾波是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。它在信號處理、控制理論、導航等領域有著廣泛應用。1.1 核心思想與基本假設核心思想:通過融合系統的動態模型(預測)和實際觀測數據(校正),以遞歸方式估計系統狀態,最小化估計誤差的方差。基本假設:系統是線性的(或可近似線性化)。噪聲符合高斯分布(過程噪聲和觀測噪聲均為白噪聲)。初始狀態的估計誤差已知。1.2 數學模型與遞歸過程卡爾曼濾波基于兩個關鍵方程:預測方程
關鍵字:
202508 邊緣檢測AI 卡爾曼濾波 打嗝模式
1、什么是卡爾曼濾波?卡爾曼濾波(Kalman filtering)是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。由于觀測數據中包括系統中的噪聲和干擾的影響,所以最優估計也可看作是濾波過程。就像移動靶在運動中,每一刻都有 “實際在哪”“跑多快”“往哪個方向拐” 這些真實狀態(對應系統狀態向量x)。但狙擊手看不到這些 “真實值”,只能通過瞄準鏡(傳感器)得到帶誤差的觀測(比如 “好像在 100 米處,可能偏左半米”)。觀測數據里的 “噪聲和干擾”,就像瞄準鏡前的樹葉、霧
關鍵字:
卡爾曼濾波 信號調理
兩輪自平衡代步小車集姿態信息感知、電機驅動、動態平衡控制于一體,設計難點在于姿態信息準確感知與自平衡控制。姿態信息感知通過帶有自適應降階卡爾曼濾波器的陀螺儀、加速度計集成傳感器來實現。針對傳統PID、LQR、人工神經網絡等自平衡控制方式的缺陷與不足,提出采用模糊PID控制。利用陀螺儀、加速度計、ARM微處理器、語音播報、LoRa通信等技術,設計出基于模糊PID的兩輪自平衡代步小車。詳細闡述了系統工作原理、系統架構、硬件設計及相關程序設計。實踐表明,基于模糊PID的兩輪自平衡代步小車具有平衡穩定、續航距離遠
關鍵字:
202302 兩輪自平衡 模糊PID 陀螺儀 加速度計 ARM LoRa 卡爾曼濾波 姿態信息
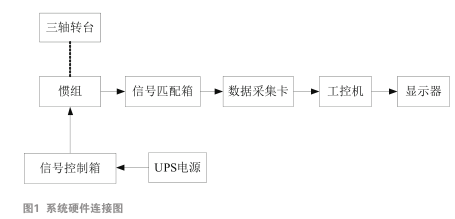
Design and implementation of high-speed data acquisition system for inertial measurement unit based on PCI express bus宋仔標,崔洪亮,高倩,劉寧(火箭軍士官學校,山東 青州 262500)?????? 摘要:慣組數據的采集是進行慣組標定及導航姿態解算的基礎,其數據采集精度對慣組的標定和導航精度有重要的影響。提出了一套基于PCI-E
關鍵字:
201904 PCI-E總線 慣性測量組合 數據采集 卡爾曼濾波
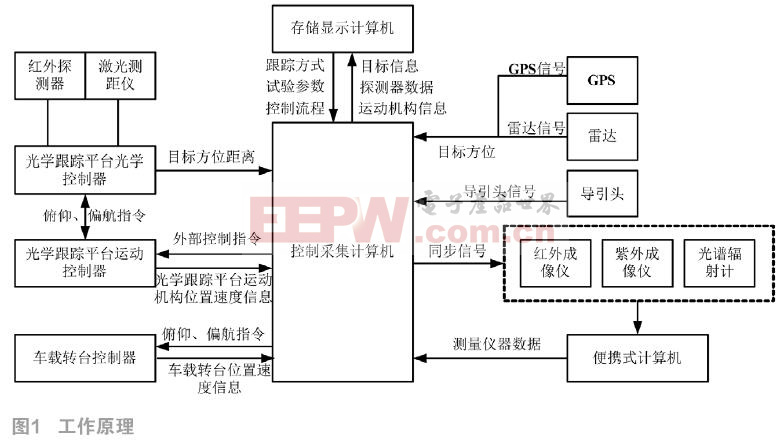
為滿足武器系統外場試驗對目標、背景及干擾的數據采集及其它制導系統的性能驗證,本文設計了一種隨動式車載光電搜跟系統。利用光學跟蹤平臺實現對動態目標的搜索和跟蹤,同時控制車載轉臺隨動,車載轉臺可搭載導引頭等其它光學探測設備,提高了系統的負載能力。針對系統延時帶來的跟蹤誤差,采用卡爾曼濾波算法對目標位置進行預測。試驗結果表明,加入預測算法后,跟蹤平臺運動更加平穩,跟蹤精度得到提高。針對設備間由于坐標不一致及安裝精度和零位偏差帶來隨動誤差,通過位置補償對隨動控制指令進行修正,改善了隨動觀測精度。系統采用模塊化設計
關鍵字:
光電跟蹤 卡爾曼濾波 預測 實時系統 201704
摘要:穩定平臺隔離載體運動的特性使其在軍事及民用領域中得到了廣泛的應用。然而由于負載特性與工況的不同以及系統技術實現復雜等原因使得穩定平臺的通用性不高。本文基于某武器系統的需要,對機電式雙軸實時穩定平
關鍵字:
TMS320F2812 實時自動調平 卡爾曼濾波 PID算法
針對智能汽車競賽中的電磁組參賽要求,提出了兩輪自平衡智能車系統的設計方案。主控芯片采用飛思卡爾公司的MC9S12XS128,選用加速度傳感器檢測車模的傾角,陀螺儀檢測車模的角加速度;通過控制兩個電機的加減速實現車模的自平衡控制。闡述了卡爾曼濾波法在陀螺儀和加速度傳感器信號融合方面的應用,提出了針對閉環速度控制的PI算法。實驗表明:該處理方法實現簡單,能夠準確、快速地實現車模的自平衡控制。
關鍵字:
自平衡 智能車 卡爾曼濾波
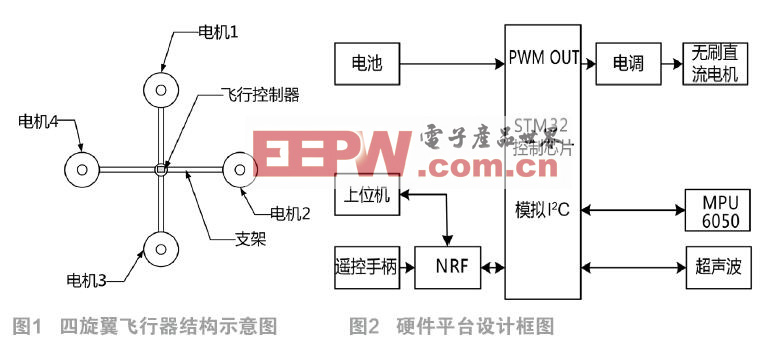
本文基于四旋翼飛行器的工作原理和性能特點,給出了飛行器控制系統設計方案,進行了姿態和高度數據采集的軟件設計,并基于卡爾曼濾波算法完成了傳感器數據融合,設計了PID控制器并完成了軟件實現。實驗結果表明,該控制系統能夠穩定可靠運行,具有較強的魯棒性。
關鍵字:
四旋翼飛行器 卡爾曼濾波 PID 魯棒性 201610
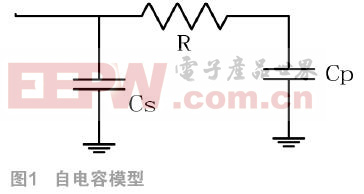
電容觸摸屏在數據采集過程中不可避免地會產生系統噪聲,為了提高觸摸屏坐標定位的精確度,在對原始數據進行定位分析前,首先采用卡爾曼濾波方法對數據進行處理,再將數據在MATLAB中用定位算法計算出觸摸屏的坐標值,并繪制坐標點圖。結果表明,卡爾曼濾波確實能夠有效去除噪聲,從而提高觸摸屏坐標定位的準確性,具有很高的實用性。
關鍵字:
電容觸摸屏 卡爾曼濾波 坐標定位 201610
著重分析了兩輪自平衡小車的設計原理與控制算法,采用卡爾曼濾波算法融合陀螺儀與加速度計信號,得到系統姿態傾角與角速度最優估計值,通過雙閉環數字PID 算法實現系統的自平衡控制。設計了以MPU-6050傳感器為姿態感知的兩輪自平衡小車系統,選用8位單片機HT66FU50A為控制核心處理器,完成對傳感器信號的采集處理、車身控制以及人機交互的設計,實現小車自主控制平衡狀態、運行速度以及轉向角度大小等功能。
關鍵字:
兩輪自平衡 姿態檢測 卡爾曼濾波 數據融合 PID 控制器 201603
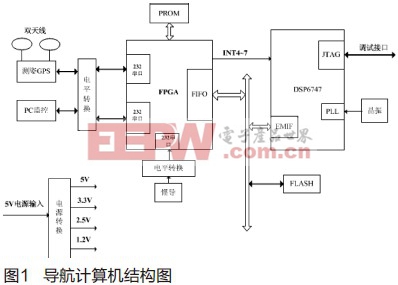
本系統作為淺組合導航系統的一種,利用了雙天線定向GPS與光纖陀螺的組合,以基于DSP+FPGA多處理器結構作為導航計算機平臺,在原有的位置與速度基礎上加入了姿態作為第三個量測量,應用卡爾曼濾波算法將GPS姿態信息作為對慣性導航系統數據的初始值和修正。設計的系統通過跑車實驗驗證后表明達到了設計要求,具有實時性好,運算精度高等優點。
關鍵字:
GPS SINS 導航系統 FPGA 卡爾曼濾波 201401
卡爾曼濾波介紹
斯坦利.施密特(Stanley Schmidt)首次實現了卡爾曼濾波器.卡爾曼在NASA埃姆斯研究中心訪問時,發現他的方法對于解決阿波羅計劃的軌道預測很有用,后來阿波羅飛船的導航電腦使用了這種濾波器. 關于這種濾波器的論文由Swerling (1958), Kalman (1960)與 Kalman and Bucy (1961)發表.
目前,卡爾曼濾波已經有很多不同的實現.卡爾曼最初提出 [
查看詳細 ]
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473