賦能 BEV 感知課題!高校科研多傳感器時間同步方案

在高校自動駕駛實驗室里,團隊可能常以 BEV(Bird’s-Eye View)感知架構為研究主線。旨在通過相機陣列和激光雷達的數據,在空間上重建統一的車周環境,為下游檢測、分割提供高精度“語義地圖”。然而,一旦相機間的時間同步存在幾十毫秒及以上的誤差,BEV 投影的理想模型便可能失效,引發一系列典型的問題:
多相機拼接的鳥瞰圖在特征層面出現撕裂,導致Transformer或者卷積融合網絡在訓練階段難以收斂,損失曲線持續振蕩。
采集到的數據因固有延遲而與真實世界的時序錯位,當反投影到激光雷達或 IMU 坐標系時,產生明顯重影現象,外參標定不可重復。
時延隨實驗次序號隨機漂移,致使在離線評估中構建的數據時序關系,無法反映實車運行的真實時序狀態,最終導致科研結論缺乏可重復性。
這些消耗巨量算力與人力的痛點,其根源往往不在于算法本身,而在于數據基石存在缺陷 —— 即傳感器間缺乏統一可信的時間基準,導致時序準確性無法保障。
由此可知,對高校自動駕駛實驗室來說,穩定的時序精度是BEV感知科研的關鍵,團隊亟需適配多源異構傳感器的高精度時間同步方案,解決數據撕裂、實驗不可復現等痛點。
本文將拆解時間同步核心難題,介紹多傳感器時間同步方案概況與應用價值,旨在幫助高校團隊實現高質量、可復現、省算力的多傳感器時間同步落地方案。
2)時間同步核心挑戰多源異構傳感器時間同步的核心挑戰集中在 “時鐘一致性、鏈路穩定性、時間戳準確性” 三大維度:
2.1 獨立時鐘溫漂系統中的每個傳感器(相機、激光雷達等)都有獨立晶振,其內部晶振的頻率存在ppm級別固有偏差。這導致各傳感器的本地時間以微小但不可忽略的差異流逝。如同每位參與者使用走時精度稍有不同的秒表,誤差會隨采集時長持續累積,即使初始同步,幾分鐘后也可能出現毫秒級的偏差。
2.2 觸發與傳輸鏈路延遲采用軟件觸發時會受到操作系統調度制約,引入毫秒級的隨機抖動。此外,數據流經不同的物理接口和協議,其固有延遲各不相同。例如,GigE Vision相機、CAN總線雷達、GMSL相機等設備即便同一時刻下發觸發,數據流入主機時刻仍然錯位。
2.3 滯后的時間戳若在數據進入操作系統內核或應用層后才為其打上時間戳,那么這個時間戳已經疊加前述所有的觸發和傳輸延遲的影響。用這個“被污染”的時間戳進行數據對齊,會導致后續的融合與算法都建立在錯誤的前提之上。理想的時間戳,是必須在數據離開傳感器物理層或進入物理鏈路的瞬間被標記。
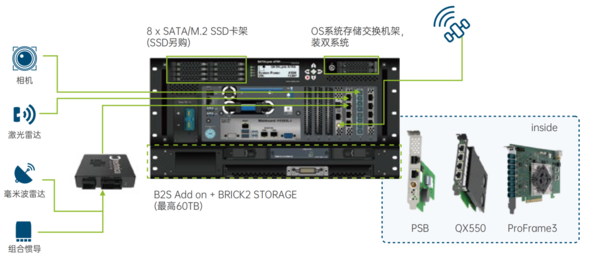
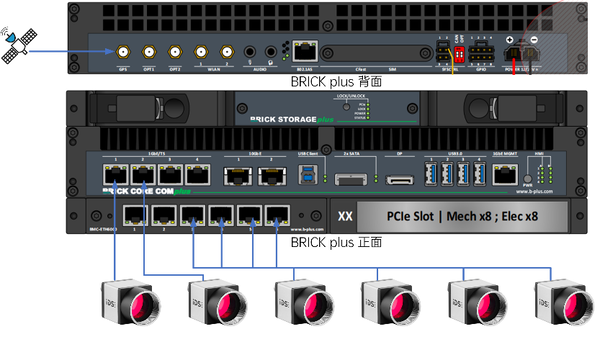
3)康謀方案概述及科研價值3.1方案概述康謀多源異構傳感器納秒級時間同步解決方案(簡稱康謀多傳感器時間同步方案)是一套基于 XTSS 服務的完整時間同步體系:以 DATALynx ATX4 或 BRICK2 作為 PTP Grandmaster(主時鐘),通過 IEEE 1588 PTP 高精度協議抵消各傳感器獨立晶振的 ppm 級溫漂誤差;
同時借助 QX550、ProFrame3 等硬件直接對接傳感器物理層,在數據離開傳感器的瞬間完成時間戳記錄,規避‘滯后時間戳’問題;并通過硬件觸發替代軟件觸發,減少操作系統調度抖動,最終構建納秒級精度的統一時間基準,通過 ADTF/ROS 等軟件框架貫穿數據處理鏈路,實現從微秒級‘軟件對齊’到納秒級‘硬件同步’的工程跨越。
康謀多傳感器時間同步方案從數據質量、實驗效果、資源利用、教學落地四大維度,可為高校自動駕駛科研與教學提供核心支撐:
1.數據集質量提升:精準時間戳有效抑制 BEV、Multi-View Stereo、Sensor Fusion 等數據中的重影與漂移,減少重復錄制。
2.實驗可復現:統一時鐘使得同樣的實驗腳本在不同采集日、不同實驗車輛上保持一致性,便于論文補充材料和開源共享。
3.算力資源節省:避免因時間錯位導致的模型不收斂,可少跑許多無效訓練,節省 GPU 配額。
4.教學項目落地:課程設計可直接使用康謀的工程案例,快速搭建“采集-標注-訓練-評估”閉環。
康謀多源異構傳感器納秒級時間同步解決方案,基于 XTSS 服務的時間同步體系,以 PTP 高精度協議、硬件觸發與物理層打戳為核心,構建納秒級統一時間基準,從根源上解決了多源異構傳感器的時序對齊難題。
該方案既能提升數據集質量、保障實驗可復現性、節省 GPU 算力資源,也可通過現成工程案例助力教學項目快速搭建 “采集 - 標注 - 訓練 - 評估” 閉環,可為高校自動駕駛科研與教學提供核心支撐!
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。










