基于SPCE061A的智能輪椅避障控制系統的設計

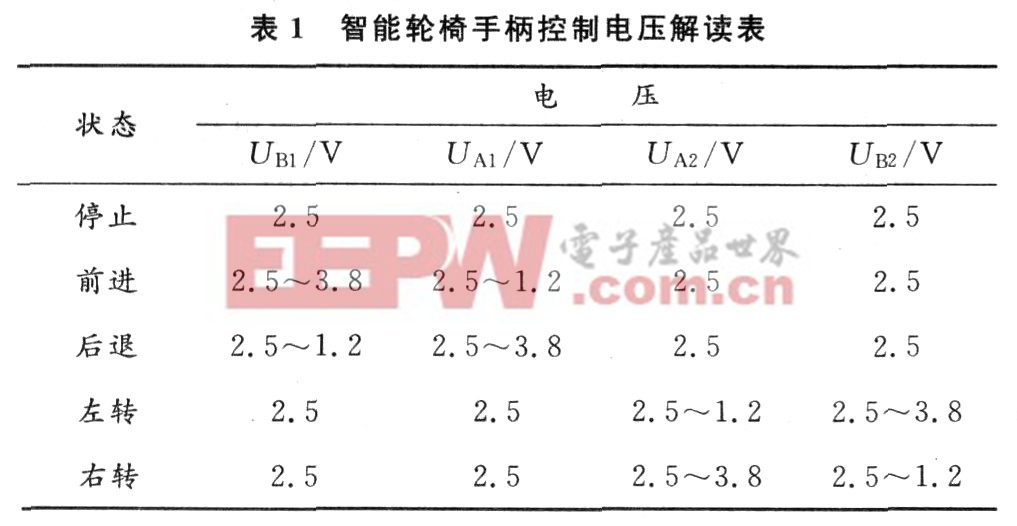
本課題的D/A模擬電路的B1,A1,A2,B2的電壓輸出分別代替了黃、褐、蘭、白四條線的電壓輸出。所以通過兩個D/A轉換器TLV5618的輸出,代替了手柄控制,具體轉換電路如圖3所示。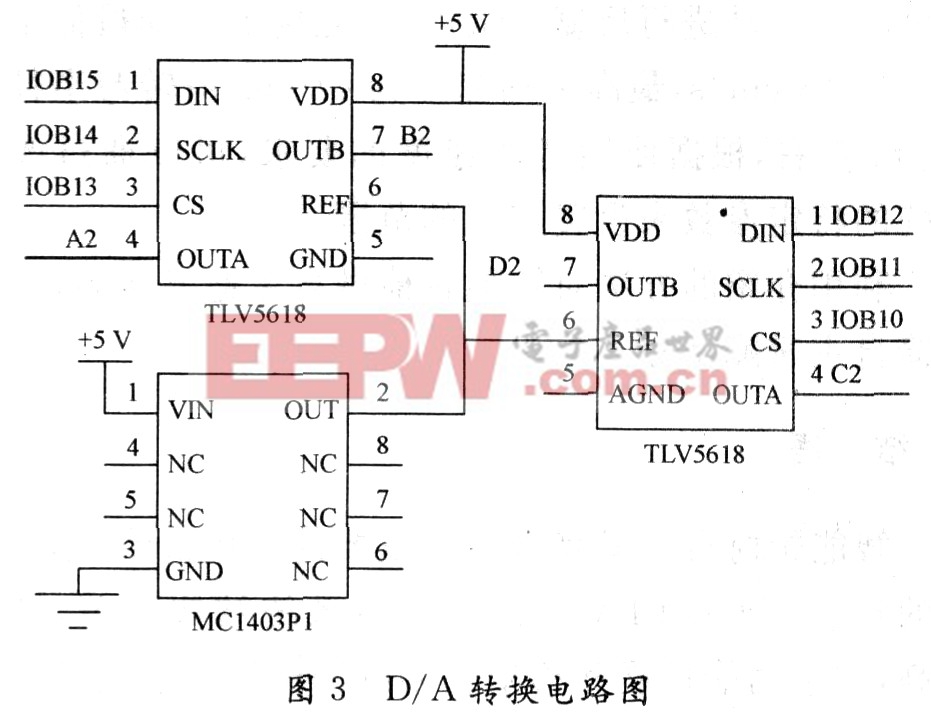
TLV5618與凌陽61單片機的3個I/0口相連,分別是數據串口DIN、時鐘信號SCLK、片選信號CS。MC1403只有3只腳有效,VDD,VSS及供給DA 2.5 V的參考電壓。
1.4 電源模塊
電路驅動模塊中用到了24 V,12 V,5 V三種電源,選用24 V,24 Ah的高能充電蓄電池作為動力能源,它為電機直接提供24 V工作電壓,12 V,5 V分別通過7812,7805芯片由24 V轉換得到。
2 智能輪椅自主避障軟件設計
系統軟件是在61單片機集成開發環境IDE2.O.O上開發的,該集成開發環境集程序的編輯、編譯、鏈接、調試以及仿真等功能為一體,具有友好的交互界面,使用戶的編程、調試工作更加方便且高效。
主程序設計如下:
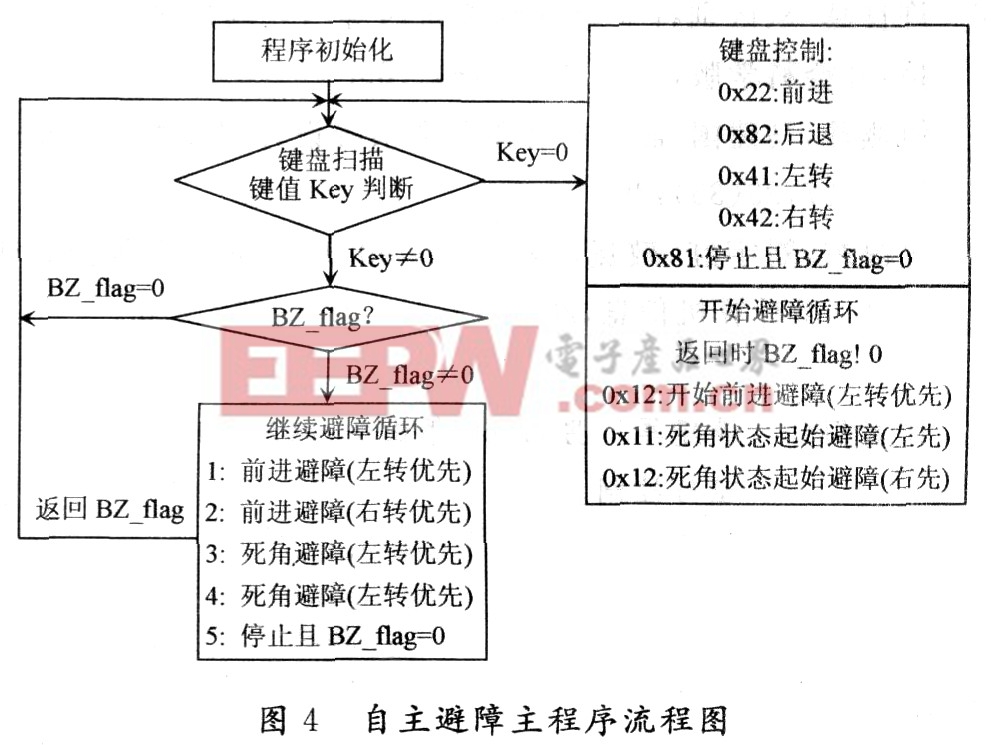
主程序主要是通過掃描鍵盤,等候用戶指令,不在避障狀態下掃描等候,而進入避障狀態后會根據探測到的環境選擇相應的避障策略。在避障過程中若用戶按下停止鍵則退出避障循環,主程序采用鍵盤掃描,節約了61單片機的中斷資源,同時也減小了對測距的干擾,增加了智能輪椅實時避障的靈敏度。主程序流程圖如圖4所示。
3 實驗結果分析
選用實驗室外空曠環境作為輪椅運動的測試環境,對輪椅的運動進行反復測試可知,輪椅的運動最低平均速度為16 cm/s,最高平均速度為41 cm/s;轉彎半徑為50 cm左右,根據使用者對速度的要求,可以通過改變系統的特定參數來設置速度的范圍。
利用介紹的方法對智能輪椅做自主避障實驗,智能輪椅自主避障良好。
4 結 語
智能輪椅自主避障具有很重要的實用價值,本文設計的基于SPCE061A的自主避障系統結構簡單,性價比高,易于功能擴展和移植。系統測試結果表明該系統基本達到實用化要求。












評論