SimData:基于aiSim的高保真虛擬數據集生成方案

一、前言
在自動駕駛感知系統的研發過程中,模型的性能高度依賴于大規模、高質量的感知數據集。目前業界常用的數據集包括 KITTI、nuScenes、Waymo Open Dataset 等,它們為自動駕駛算法的發展奠定了重要基礎。
然而,構建真實世界的感知數據集并非易事——不僅需要投入大量人力、物力與時間成本,還需要面對數據采集受限、隱私合規、標注耗時以及極端場景(corner case)難以獲取等諸多挑戰。
在此背景下,高保真虛擬數據集正成為自動駕駛感知算法研究的新方向。通過仿真平臺生成的虛擬數據,不僅能夠快速擴充數據規模,還可靈活構造復雜路況、惡劣天氣及罕見事件,為模型提供更全面的訓練樣本。
基于此bbe,本文介紹全新的高保真虛擬數據集——SimData。SimData依托aiSim的高精度物理建模與逼真視覺渲染能力,能夠生成多傳感器同步數據(包括相機、激光雷達、雷達、IMU 等),實現與真實世界數據一致的多模態特性。SimData數據結構嚴格遵循nuScenes數據集格式規范,可直接使用官方nuscenes-devkit工具解析和可視化,大幅降低開發者上手成本。
本文將介紹SimData的核心特性與構建流程,并展示其在典型感知任務中的表現。SimData 正式版及相關對比測試報告將于近期發布
二、SimData構建過程
1、傳感器布局
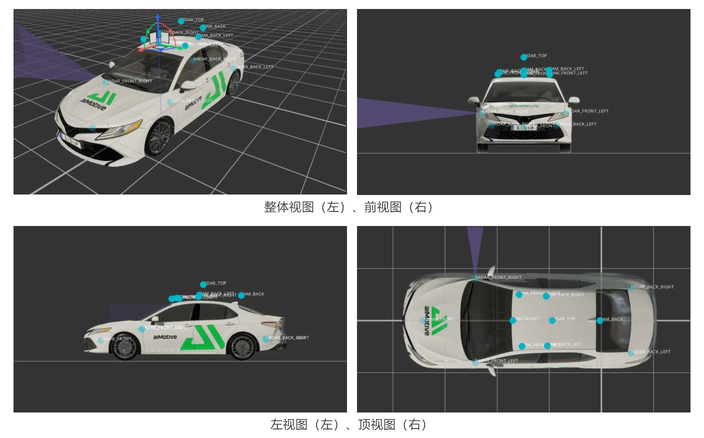
在 aiSim 仿真平臺中,我們嚴格復現了 nuScenes 數據集的傳感器布局,以確保數據結構和多模態同步特性的一致性。 仿真車輛共配置了 6 路環視相機、5 個雷達(Radar)、1 個激光雷達(LiDAR)、1 個慣性測量單元(IMU)以及 1 個定位系統(GPS)。 其中,相機與雷達的采樣頻率均為 40 Hz,激光雷達的采樣頻率為 80 Hz,能夠滿足高時序精度的多傳感器同步采集需求。 各傳感器的空間布設與朝向如下圖所示。
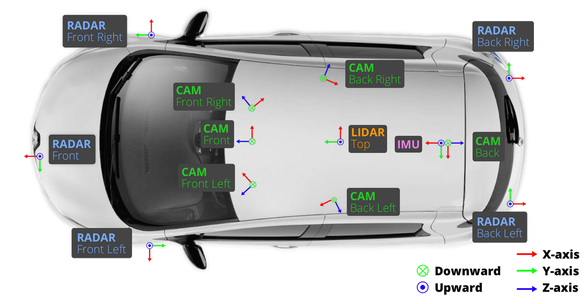
與 nuScenes 不同的是,SimData 中所有傳感器均采用 FLU(Forward–Left–Up) 坐標系,而在 nuScenes 數據集中,相機傳感器使用的是 RDF(Right–Down–Forward) 坐標系。 在數據構建過程中,我們對所有標注文件進行了嚴格的坐標系轉換與對齊處理,確保坐標定義在邏輯上與 nuScenes 完全一致。
因此,用戶在使用 SimData 時,無需額外關注坐標差異,其數據解析與開發體驗與 nuScenes 保持一致。 下圖展示了 nuScenes 中各傳感器的典型布局及其坐標系定義。
2、數據結構
SimData 數據集在結構設計上與 nuScenes 完全保持一致。對于已經熟悉 nuScenes 的開發者而言,無需額外的適配或學習成本,即可快速上手 SimData 的使用與解析。 下圖展示了 SimData 數據集的整體目錄結構,nuScenes 同樣遵循這一組織形式,以實現無縫兼容與工具級互通。

具體說明如下:
(1)maps文件夾
存放數據集中使用到的所有高精地圖圖像文件,用于提供地理位置信息和場景背景參考。
(2)samples文件夾
存放各類傳感器的關鍵幀數據,包括:
6 路攝像頭圖像(.jpg文件)
5 路雷達點云(.pcd文件)
1 路激光雷達點云(.bin文件)
其中,每隔0.5 秒抽取一幀數據作為關鍵幀進行保存。
(3)sweeps文件夾
保存除關鍵幀以外的連續傳感器數據,用于構建時序信息和多幀融合任務。
(4)v1.0-*文件夾
存放傳感器的標注與元數據信息,所有文件均以.json格式保存,涵蓋時間戳、姿態參數、標注標簽、場景描述等內容。
各個json標注文件的關系網絡也與nuScenes數據集保持一致,這里以nuScenes官方文件結構圖進行說明。

在 SimData 數據集中,每個文件中的信息塊均通過一個全局唯一的 UUID(Universally Unique Identifier) 作為 token 進行標識。
這些 token 構成了數據集中不同信息之間的關聯橋梁,用戶可通過 sample.json、sample_data.json 和 sample_annotation.json三個核心文件獲取絕大多數標注與結構化信息。
(1)sample.json
sample.json文件記錄了關鍵幀(Keyframe)的基礎信息。
每個關鍵幀都對應一個sample_token,用于唯一標識該幀數據。
通過scene_token可在scene.json文件中查找到該樣本所屬的場景。
文件中還提供了 前一幀 (prev) 與 后一幀 (next) 的token,可用于構建連續幀關系。
(2)sample_data.json
利用sample_token可在sample_data.json 中獲取對應幀的多傳感器數據詳情,包括:
ego_pose_token:車輛自車位姿的引用,可在 ego_pose.json 中獲得該時刻的位姿信息(位置與朝向)。
calibrated_sensor_token:對應傳感器的標定參數,可在 calibrated_sensor.json 中查詢到該傳感器的內參與外參信息。
filename:傳感器原始數據的文件路徑。若為相機數據,還包含圖像的高度(height)與寬度(width)。
timestamp:時間戳(單位:微秒),用于多傳感器時間同步。
is_key_frame:布爾值,指示該幀是否為關鍵幀。
next / prev:分別指向下一幀和前一幀的 token,實現時序關聯。
(3)sample_annotation.json
sample_annotation.json文件記錄了每個關鍵幀中檢測到的目標物體信息,可通過 sample_token 進行關聯。 包含的主要字段如下:
a. instance_token:目標實例的唯一標識。
可在 instance.json 中查詢到該實例對應的 category_token(類別信息)、首次與最后出現的關鍵幀 token。
通過 category_token 可進一步在 category.json 中獲取該實例的具體類別名稱。
b. visibility_token:可見度等級標識(共四級,數值越大表示可見度越高),其定義可在 visibility.json 中查閱。
c. 目標的幾何與姿態信息:包括
中心點位置 (translation)
尺寸大小 (size)
旋轉角度 (rotation),以 四元數(Quaternion) 形式存儲 這些位姿均定義在傳感器坐標系下。
d. 點云統計信息:檢測框中包含的 激光雷達點數 (num_lidar_pts) 與 雷達點數 (num_radar_pts)。
e. 前后幀關聯:分別記錄該實例在前一幀與后一幀中的對應 token。
三、SimData的使用方法與感知模型使用示例
1、使用方法與真值可視化
SimData可以直接使用nuScenes-devkit進行解析,使用方法與nuScenes數據集一致。
示例:
from nuscenes.nuscenes import NuScenes
nusc = NuScenes(version='v1.0-custom', dataroot=data_path, verbose=True)
得到示例化對象后便可以使用nuScenes官方提供的工具對SimData進行分析和模型訓練。配合cv2或matplotlib可以對數據集進行可視化:
同步lidar點云,可以同時繪制出bev視角下的標注信息
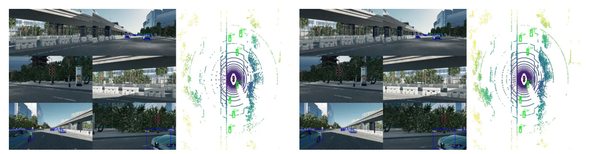
2、bevformer檢測效果展示
以下是使用在nuScenes數據集下訓練的權重,采用bevformer-tiny模型直接進行檢測的效果(即沒有在SimData上進行訓練)。
bevformer官方代碼庫:https://github.com/fundamentalvision/BEVFormer/tree/master
bevformer論文:https://arxiv.org/pdf/2203.17270
四、總結
本文闡述了虛擬數據集在自動駕駛感知研究中的重要性,并介紹了基于 aiSim 仿真平臺生成的高保真虛擬感知數據集——SimData。 文章詳細說明了 SimData 的數據組成結構與使用方法,并利用開源感知模型對其進行了檢測驗證,從而驗證了數據集的可用性與有效性。
更為詳盡的測試與對比報告將會發布,以進一步驗證 SimData 與真實數據集之間的高一致性。通過這一系列工作,我們不僅證明了 aiSim 仿真環境的高保真特性,也為研究者與開發者提供了一個高質量、易用且可擴展的虛擬感知數據資源,以持續助力自動駕駛感知算法的研究與訓練。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。










