SimData深度解析:高保真虛擬數(shù)據(jù)集的構(gòu)建與評(píng)測(cè)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫查詢
在自動(dòng)駕駛感知的下半場(chǎng),數(shù)據(jù)已成為驅(qū)動(dòng)算法迭代的核心燃料。然而,真實(shí)路測(cè)數(shù)據(jù)面臨著成本高昂、標(biāo)注困難、極端場(chǎng)景(Corner Cases)難以覆蓋以及安全性受限等“卡脖子”問題。
面對(duì)這一核心痛點(diǎn),虛擬仿真數(shù)據(jù)已成為解決方案中的關(guān)鍵角色,成為確保開發(fā)效率與安全性的不可或缺一環(huán)。免費(fèi)獲取 | SimData高保真虛擬數(shù)據(jù)集開源發(fā)布,兼容nuScenes,開箱即用!文章中,簡(jiǎn)單介紹了一下SimData數(shù)據(jù)集情況,本文將深度解析該SimData自動(dòng)駕駛虛擬數(shù)據(jù)集——由aiSim仿真平臺(tái)構(gòu)建,從數(shù)據(jù)生產(chǎn)工具鏈、數(shù)據(jù)集結(jié)構(gòu)到基于BEVFormer的深度評(píng)測(cè),全方位展示高保真合成數(shù)據(jù)的應(yīng)用價(jià)值。
一、 從仿真到標(biāo)準(zhǔn)格式的工具鏈虛擬數(shù)據(jù)要真正落地,首要解決的是與現(xiàn)有主流數(shù)據(jù)格式的兼容性。SimData方案不僅提供數(shù)據(jù),更提供了一套完整的aisim2buscenes自動(dòng)化轉(zhuǎn)換工具鏈,并且構(gòu)建了虛擬數(shù)據(jù)集的評(píng)測(cè)流程框架。
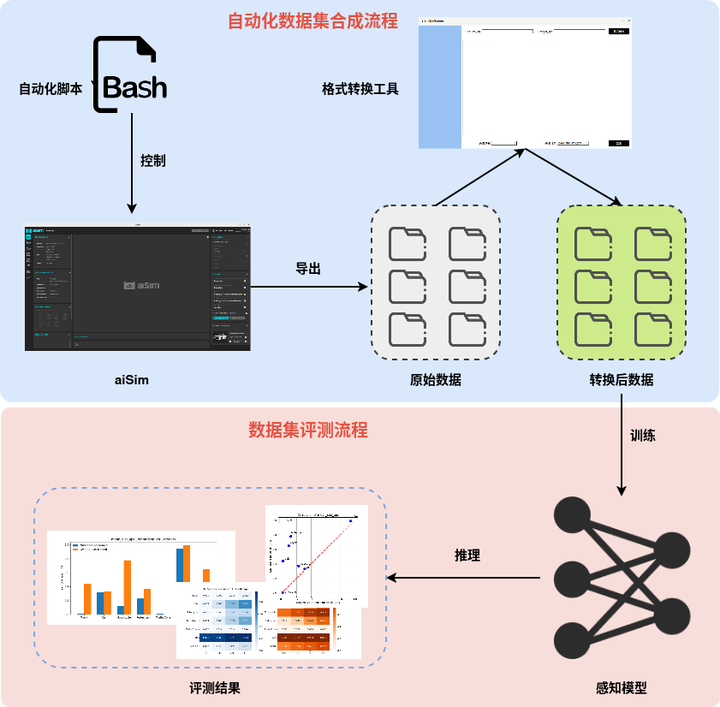
虛擬數(shù)據(jù)集構(gòu)建以及評(píng)測(cè)流程框架
1、無縫兼容 nuScenes我們開發(fā)了自動(dòng)化腳本與GUI工具,實(shí)現(xiàn)了從aiSim導(dǎo)出數(shù)據(jù)到nuScenes標(biāo)準(zhǔn)格式的一鍵轉(zhuǎn)換。
格式對(duì)齊:自動(dòng)將aiSim原始數(shù)據(jù)(TGA圖像、LAS點(diǎn)云、Radar JSON)轉(zhuǎn)換為nuScenes兼容格式(JPG、BIN、PCD)。
結(jié)構(gòu)一致:生成的文件夾結(jié)構(gòu)(maps, samples, sweeps, v1.0-custom)可直接被官方nuscenes-devkit解析,無需修改現(xiàn)有訓(xùn)練代碼。
智能切片:腳本支持多場(chǎng)景、多地圖轉(zhuǎn)換,默認(rèn)每場(chǎng)景40關(guān)鍵幀(每10幀抽取1關(guān)鍵幀),自動(dòng)處理非關(guān)鍵幀歸檔。
工具鏈支持復(fù)雜傳感器配置的數(shù)據(jù)生成與驗(yàn)證:
傳感器配置:目前支持6路相機(jī)、5個(gè)Radar、1個(gè)LiDAR的多源融合感知。
可視化驗(yàn)證:內(nèi)置腳本支持LiDAR點(diǎn)云、Radar PCD文件以及帶3D GT框的圖像/BEV視角可視化,確保數(shù)據(jù)“所見即所得”。
基于上述工具鏈,我們構(gòu)建了SimData數(shù)據(jù)集,旨在覆蓋高速、城區(qū)、停車場(chǎng)等典型及復(fù)雜道路環(huán)境。
規(guī)模統(tǒng)計(jì):包含15個(gè)獨(dú)立地圖,共計(jì)45個(gè)場(chǎng)景。
數(shù)據(jù)體量:?jiǎn)蝹€(gè)傳感器輸出約18,000張圖像/幀數(shù)據(jù),總樣本量充足。
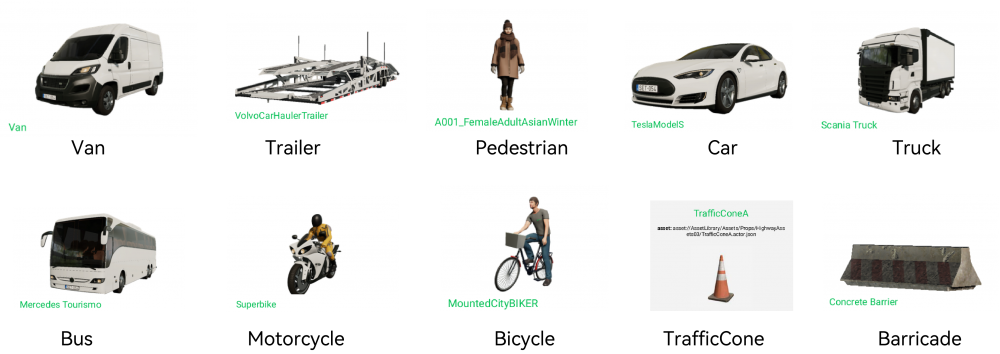
類別擴(kuò)展:在nuScenes原有的Car, Pedestrian, Truck, Bus等常見類別基礎(chǔ)上,新增了Van(面包車)類別,共計(jì)10類目標(biāo),彌補(bǔ)了部分長(zhǎng)尾數(shù)據(jù)的缺失。
10個(gè)類別:
{ "Van", "Trailer","Pedestrian", "Car", "Truck", "Bus", "Motorcycle", "Bicycle","TrafficCone","Barricade" }
虛擬數(shù)據(jù)形象部分示例:
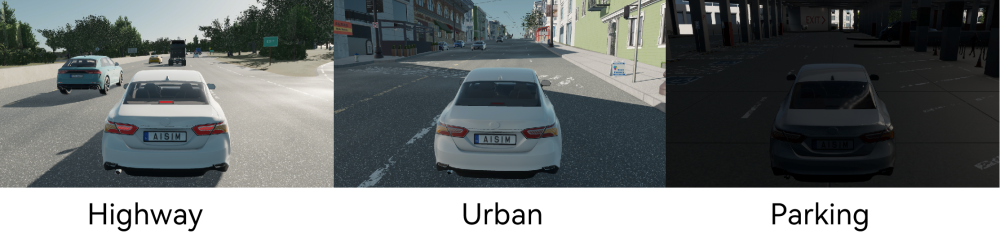
環(huán)境多樣性:
Highway:高速公路匝道、施工區(qū)。
Urban:擁堵城區(qū)、環(huán)島、十字路口。
Parking:室內(nèi)外停車場(chǎng)環(huán)境。
地圖示例:
為了驗(yàn)證SimData在感知算法中的有效性,我們選用BEV感知領(lǐng)域的經(jīng)典模型 BEVFormer (Tiny版),進(jìn)行了多維度的對(duì)比實(shí)驗(yàn)與分析。
1、基礎(chǔ)性能:虛擬數(shù)據(jù)具備可用性在SimData劃分的訓(xùn)練集(30個(gè)場(chǎng)景)上訓(xùn)練,并在測(cè)試集(15個(gè)場(chǎng)景)上評(píng)估,模型展現(xiàn)了良好的收斂性。

結(jié)果:mAP達(dá)到 0.446,NDS達(dá)到 0.428。
結(jié)論:SimData能夠支持復(fù)雜感知模型的正常訓(xùn)練與推理,數(shù)據(jù)質(zhì)量合格。
我們對(duì)比了“基于SimData訓(xùn)練的模型”與“基于真實(shí)nuScenes訓(xùn)練的官方模型”在同一份虛擬數(shù)據(jù)上的表現(xiàn),以探究域分布差異。
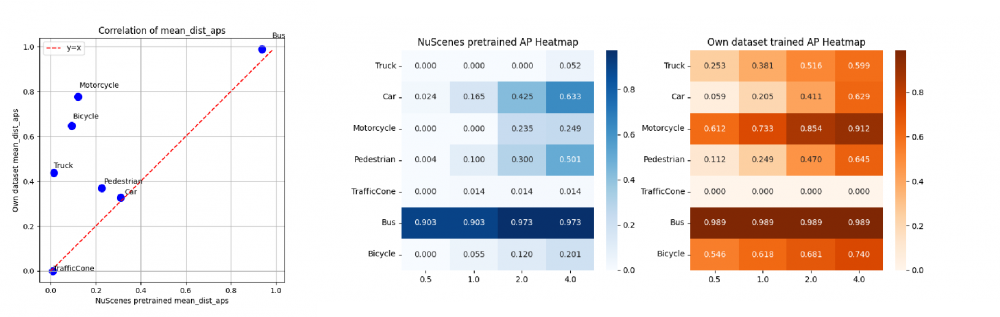
相關(guān)性分析:兩者在各類別的AP(平均精度)分布上呈現(xiàn)高度正相關(guān)。
熱力圖對(duì)比:在不同距離范圍的檢測(cè)熱力圖上,兩者表現(xiàn)出非常相似的分布趨勢(shì)。
結(jié)論:SimData的高保真度體現(xiàn)在幾何結(jié)構(gòu)、光照、材質(zhì)及動(dòng)態(tài)特性上,真實(shí)世界學(xué)到的先驗(yàn)知識(shí)可以有效遷移到該仿真域中。
這是本次評(píng)測(cè)最核心的發(fā)現(xiàn)。我們嘗試將nuScenes預(yù)訓(xùn)練模型在SimData上進(jìn)行微調(diào)(Fine-tuning)。
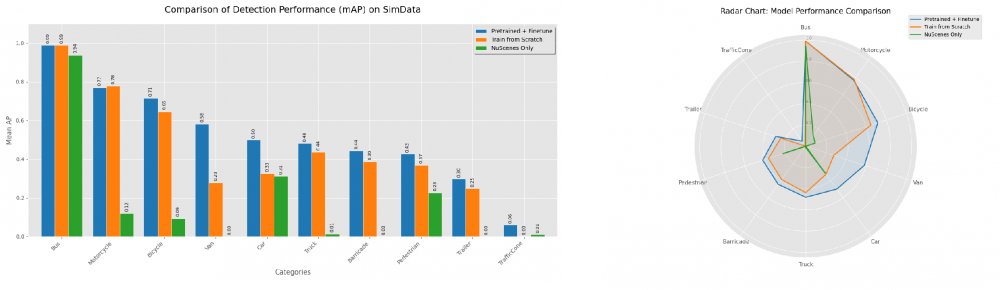
實(shí)驗(yàn)結(jié)果:微調(diào)后的模型在SimData上的檢測(cè)精度顯著提升,性能甚至超過了從零開始訓(xùn)練(Train from Scratch)的模型。
雷達(dá)圖分析:在Car, Truck, Bus等主要類別上,"Pretrained + Finetune"(藍(lán)線)包圍面積最大,表現(xiàn)最優(yōu)。
這一結(jié)果有力證明了:
SimData的域特性與真實(shí)數(shù)據(jù)足夠接近,不存在巨大的域鴻溝。
利用大規(guī)模真實(shí)數(shù)據(jù)預(yù)訓(xùn)練 + 針對(duì)性虛擬數(shù)據(jù)微調(diào),是提升模型在特定場(chǎng)景(如極端工況)泛化能力的有效路徑。
SimData及配套工具鏈的推出,為自動(dòng)駕駛數(shù)據(jù)閉環(huán)提供了一種低成本、高效率的解題思路。
易用性:aisim2nuscenes工具鏈讓仿真數(shù)據(jù)即插即用,無縫融入現(xiàn)有開發(fā)流。
真實(shí)性:評(píng)測(cè)數(shù)據(jù)表明,SimData與真實(shí)數(shù)據(jù)分布趨勢(shì)一致,具備極高的物理感知價(jià)值。
價(jià)值點(diǎn):它不僅能作為感知模型的訓(xùn)練補(bǔ)充,更是驗(yàn)證模型泛化能力、解決長(zhǎng)尾問題的理想“演兵場(chǎng)”。
未來,隨著數(shù)據(jù)集規(guī)模的進(jìn)一步擴(kuò)大(解決部分類別樣本稀缺問題),SimData有望在更復(fù)雜的感知任務(wù)中發(fā)揮關(guān)鍵作用,助力自動(dòng)駕駛算法加速迭代。
*博客內(nèi)容為網(wǎng)友個(gè)人發(fā)布,僅代表博主個(gè)人觀點(diǎn),如有侵權(quán)請(qǐng)聯(lián)系工作人員刪除。










