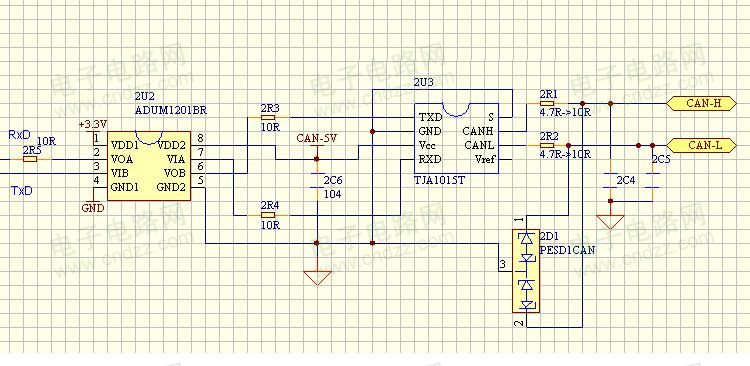
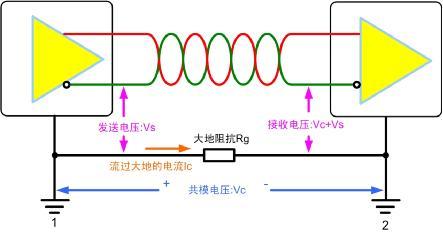
CAN BUS(Controller Area Network Bus)是汽車電子領域最核心的通信協議之一,由博世公司于20世紀80年代開發,旨在解決傳統汽車線束復雜、可靠性低的問題。作為多主架構的串行通信總線,它通過統一的數字信號傳輸標準,實現了車內電子控制單元(ECU)間的高效協同,成為現代汽車智能化與電氣化轉型的底層基石。CAN BUS基于雙絞線或光纖物理介質,采用差分電壓傳輸機制:靜態時兩條信號線(CAN_H與CAN_L)電壓均為2。5V,表示邏輯“1”(隱性狀態);當CAN_H升至3。