


如何調(diào)整CAN位寬容忍度?
CAN
2024-10-17
如何處理不支持網(wǎng)絡(luò)過濾的CAN收發(fā)器失能問題
CAN
2024-09-27
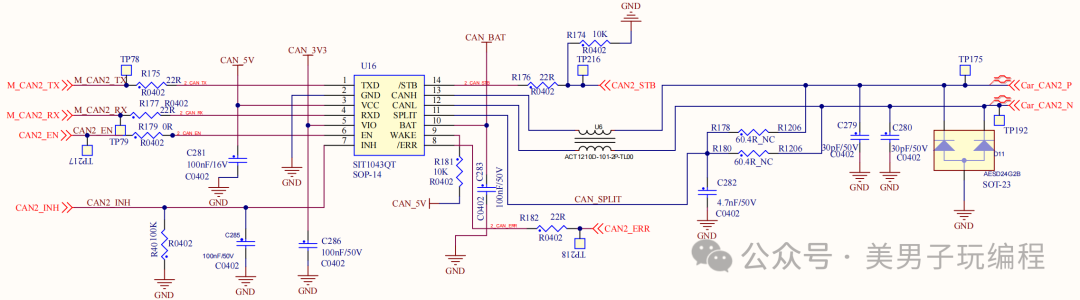
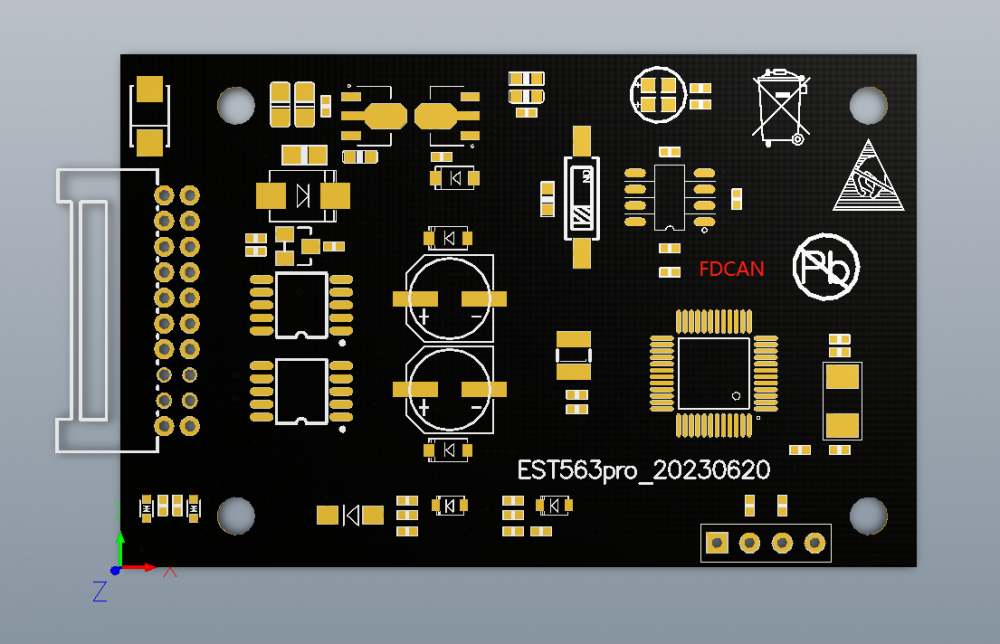
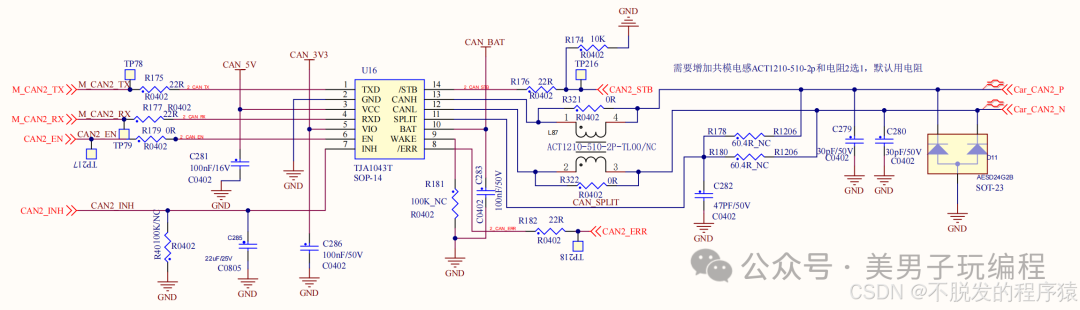
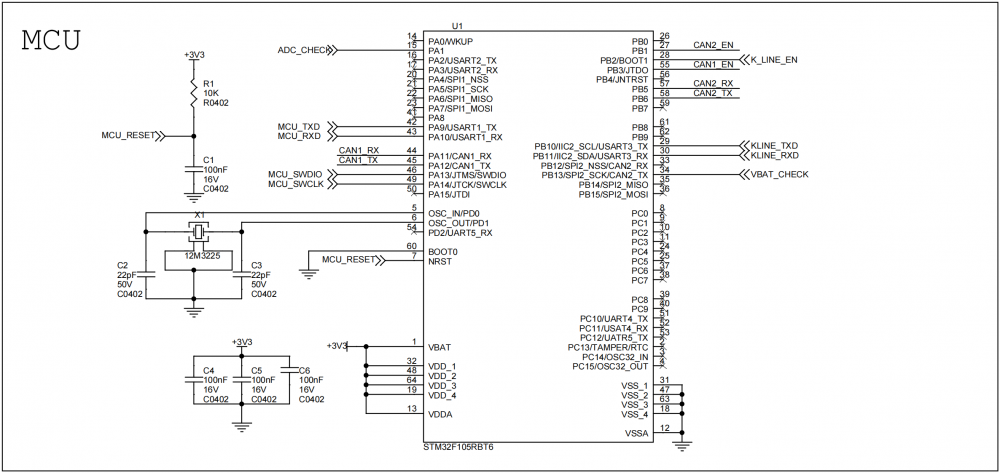
車規(guī)級CAN總線外圍電路設(shè)計方案
CAN
2024-09-19







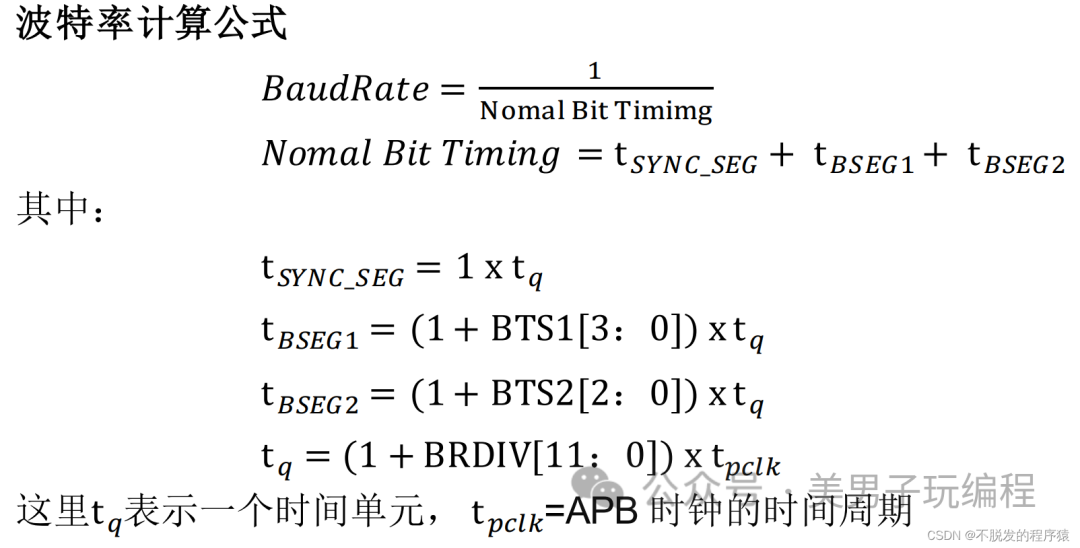
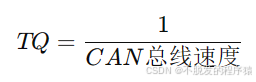
如何計算CAN通信波特率
CAN
2024-01-10






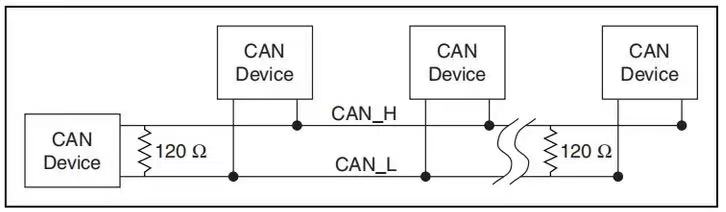



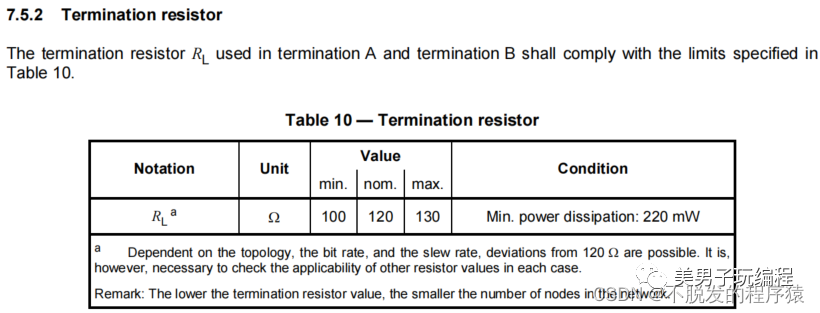
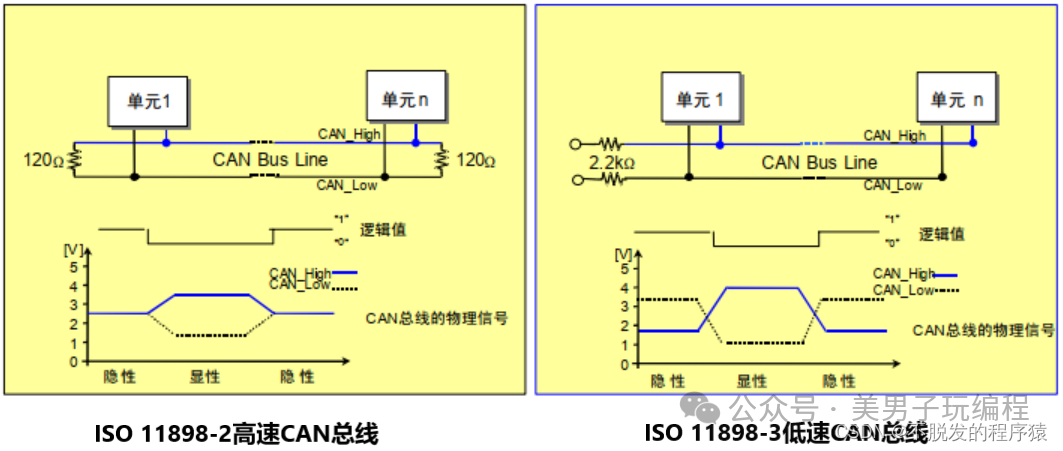
CAN總線網(wǎng)絡(luò)中為什么需要安裝終端電阻?
CAN
2023-04-25
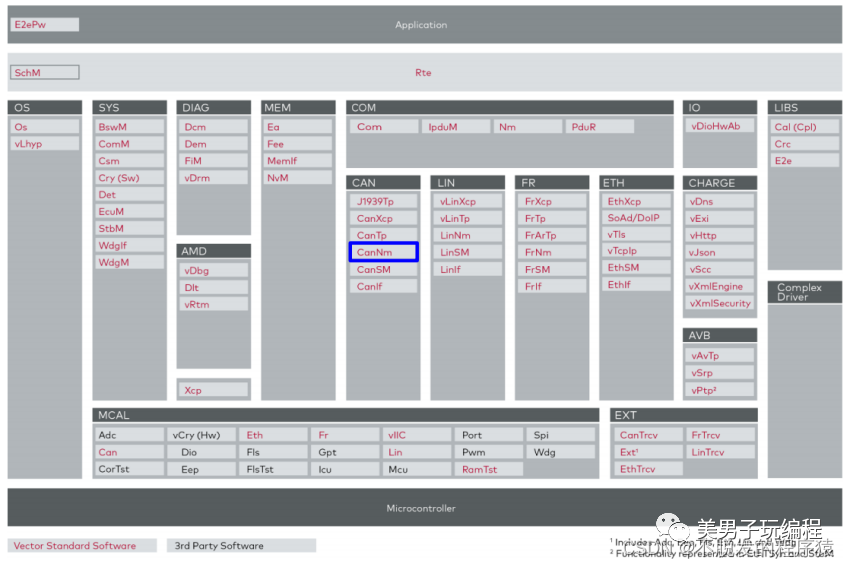
詳解AUTOSAR:AUTOSAR CAN網(wǎng)絡(luò)管理/CAN NM
CAN
2023-04-25
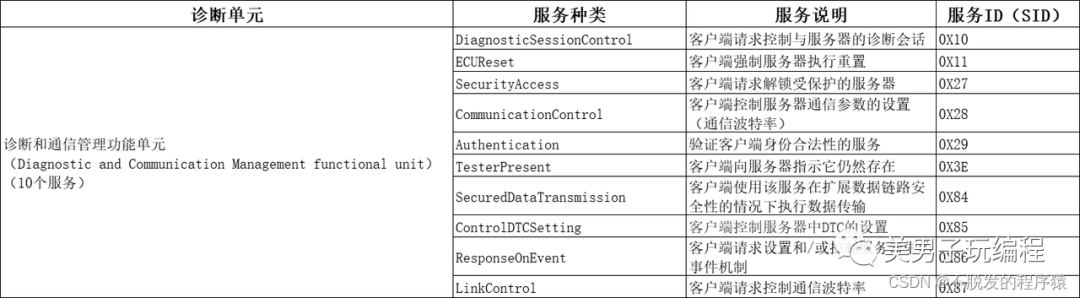
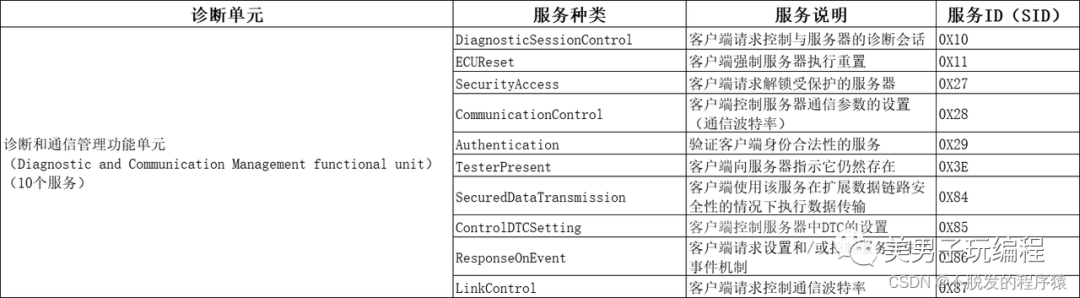
詳解UDS CAN診斷:ECUReset Service(SID:0X11)
CAN
2022-11-30






